Номер варианта – VII
Задание на курсовой проект :
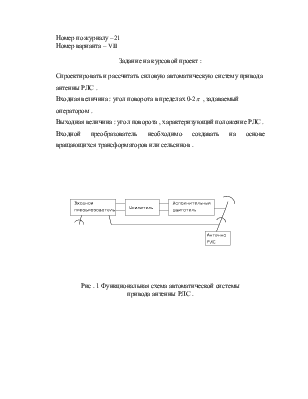
Спроектировать и рассчитать силовую автоматическую систему привода антенны РЛС .
Входная величина : угол поворота в пределах 0-2![]() , задаваемый оператором .
, задаваемый оператором .
Выходная величина : угол поворота , характеризующий положение РЛС .
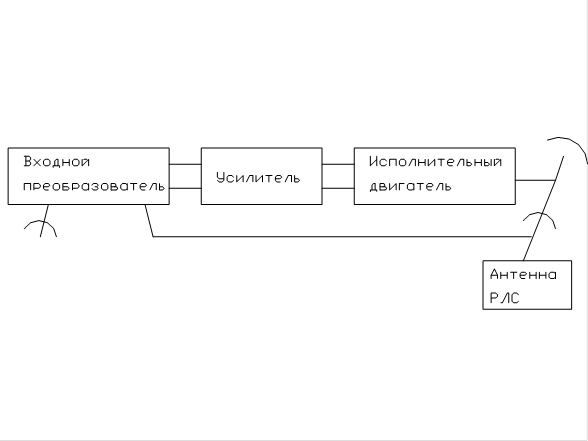 |
Рис . 1 Функциональная схема автоматической системы
привода антенны РЛС .
Требования к следящей системе :
1. Статический момент нагрузки на исполнительном валу не превышает Мст = 10 Н*м .
2. Момент инерции на валу исполнительного устройства не превышает Jн = 224,8 кг*м2 .
3. Закон движения задающей оси ![]()
4. Допустимая позиционная ошибка
![]() 10-3 рад
10-3 рад
5. Допустимая кинетическая
ошибка ![]() 10-3 рад
10-3 рад
6. Допустимая динамическая
ошибка ![]() 10-3 рад
10-3 рад
7. Источник питания частотой f = 500 Гц .
8. Действующее значение напряжения питающей сети U = 120 В .
9. Вид динамической коррекции – параллельная .
10. Запас по фазе разомкнутой системы должен быть не меньше 40о
11. Допустимая величина перерегулирования должна быть не более 30%
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.