СИСТЕМЫ ПЕРЕДАЧ ПОКАЗАНИЙ НА РАССТОЯНИЕ
Передача показаний приборов на расстояние может осуществляться различными электрическими и пневматическими системами.
Эта система применяется для передачи показаний манометров, расходомеров, уровнемеров и приборов другого типа.
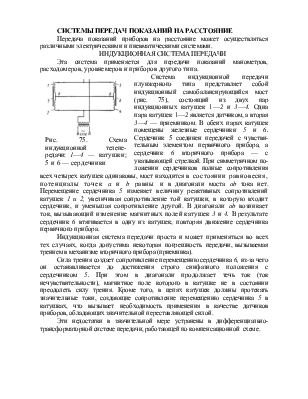
 Система
индукционной передачи плунжерного типа представляет собой
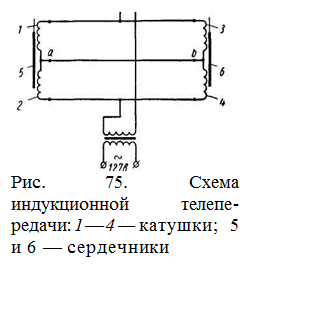
индукционный самобалансирующийся мост (рис. 75), состоящий из двух пар индукционных катушек
1—2 и 3—4. Одна пара катушек 1—2 является датчиком, а вторая 3—4 — приемником. В обеих парах катушек помещены железные сердечники 5 и 6. Сердечник 5 соединен передачей с чувствительным элементом
первичного прибора, а сердечник 6
вторичного прибора — с
указывающей стрелкой. При
симметричном положении сердечников полные сопротивления всех четырех катушек
одинаковы, мост находится в
состоянии равновесия, потенциалы точек а и bравны и в диагонали
моста abтока нет.
Перемещение сердечника 5 изменяет величину реактивных сопротивлений катушек 1 и 2, увеличивая сопротивление той катушки, в которую входит
сердечник, и уменьшая сопротивление
другой. В диагонали abвозникает ток, вызывающий
изменение магнитных полей катушек 3 и 4. В результате сердечник 6 втягивается
в одну из катушек, повторяя движение сердечника первичного прибора.
Система
индукционной передачи плунжерного типа представляет собой
индукционный самобалансирующийся мост (рис. 75), состоящий из двух пар индукционных катушек
1—2 и 3—4. Одна пара катушек 1—2 является датчиком, а вторая 3—4 — приемником. В обеих парах катушек помещены железные сердечники 5 и 6. Сердечник 5 соединен передачей с чувствительным элементом
первичного прибора, а сердечник 6
вторичного прибора — с
указывающей стрелкой. При
симметричном положении сердечников полные сопротивления всех четырех катушек
одинаковы, мост находится в
состоянии равновесия, потенциалы точек а и bравны и в диагонали
моста abтока нет.
Перемещение сердечника 5 изменяет величину реактивных сопротивлений катушек 1 и 2, увеличивая сопротивление той катушки, в которую входит
сердечник, и уменьшая сопротивление
другой. В диагонали abвозникает ток, вызывающий
изменение магнитных полей катушек 3 и 4. В результате сердечник 6 втягивается
в одну из катушек, повторяя движение сердечника первичного прибора.
Индукционная система передачи проста и может применяться во всех тех случаях, когда допустима некоторая погрешность передачи, вызываемая трением в механизме вторичного прибора (приемника).
Сила трения создает сопротивление перемещению сердечника 6, из-за чего он останавливается до достижения строго синфазного положения с сердечником 5. При этом в диагонали продолжает течь ток (ток нечувствительности), магнитное поле которого в катушке не в состоянии преодолеть силу трения. Кроме того, в цепях катушек должны протекать значительные токи, создающие сопротивление перемещению сердечника 5 в катушках, что вызывает необходимость применения в качестве датчиков приборов, обладающих значительной переставляющей силой.
Эти недостатки в значительной мере устранены в дифференциально-трансформаторной системе передачи, работающей по компенсационной схеме.
|
|
ДИФФЕРЕНЦИАЛЬНО-ТРАНСФОРМАТОРНАЯ СИСТЕМА
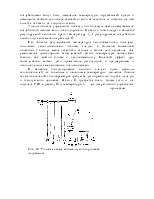
Принципиальная электрическая схема этой системы передачи показана на рис. 76. Передающая система состоит из двух индукционных устройств 1 и 2 дифференциально-трансформаторного типа. Передатчик и приемник состоят из катушек с первичной и двумя вторичными обмотками, внутри которых находятся железные плунжеры.
Плунжер передатчика связан с подвижной деталью измерительного прибора-датчика и перемещается внутри катушки соответственно изменению измеряемой величины.
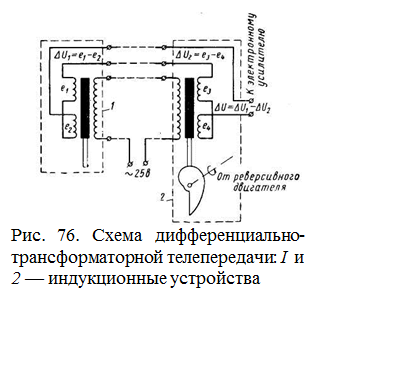 Первичные
обмотки обеих катушек включены последовательно в цепь переменного
тока, а вторичные катушки — навстречу одна другой.
Первичные
обмотки обеих катушек включены последовательно в цепь переменного
тока, а вторичные катушки — навстречу одна другой.
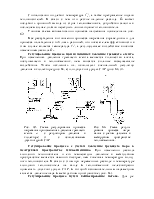
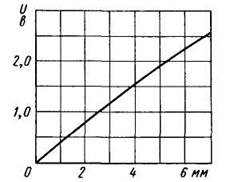
График зависимости индуктированной э. д. с. от перемещения плунжера (рис. 77) показывает, что при перемещении плунжера до 5 мм зависимость практически линейна.
Если плунжеры обеих катушек находятся в среднем положении, то
DU1 = е1 — е2 = 0 и
DU2 = е3 — е4 = 0.
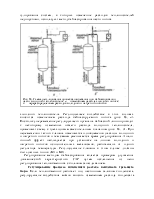
DU = DU1 — DU2на входе усилителя также будет равно нулю. При рассогласовании положений плунжеров в катушках выходное напряжение разбаланса поступает в электронный усилитель. Усиленный сигнал разбаланса направляется в управляющую обмотку реверсивного электродвигателя, на оси которого укреплен кулачок, перемещающий плунжер в катушке приемника до положения совпадения с плунжером в катушке первичного прибора. Одно временно с поворотом профилированного диска перемещается связанное с ним указывающее устройство вторичного прибора.
Напряжение разбаланса может возникнуть из-за разности температур катушек датчика и приемника. Активная составляющая этого напряжения разбаланса создает дополнительный вращающий момент и дополнительную погрешность. Изменение разности температур катушек датчика и приемника на каждые 10° С вызывает дополнительную погрешность в пределах 0,1—0,15% диапазона измерения.
|
Рис. 77. Зависимость индукти:руемой э. д. с. от перемещения плунжера |
Вторичные приборы дифференциально-трансформаторной системы построены на базе электронных автоматических потенциометров.
Эта система применяется для приборов с угловым перемещением (например
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.