применяется в устройствах преобразования потенциалов от заземленных и незаземленных нагрузок. Данная схема обладает большим входным сопротивлением, имеется возможность изменения коэффициента усиления одним резистором ra, коэффициент передачи синфазной составляющей не зависит от коэффициента усиления.
Кроме того в схеме осуществляется компенсация влияния соединительных проводников (потенциал Uerror) путём подсмещения выходной характеристики на соответствующую величину. Это даёт возможность подстраивать измерительную схему в зависимости от конкретного значения сопротивления подводящих проводов.
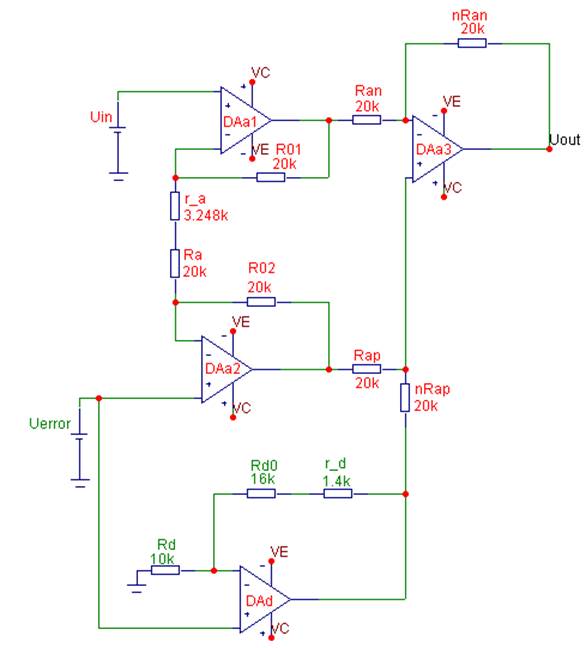
Рис.10. Модель входного усилителя в MicroCAP.
Если ![]() ,
, ![]() ,
, ![]() , тогда:
, тогда:
 , откуда при KU=2,721,
R0=20
кОм, R=20 кОм, n=1, R·n=20 кОм имеем:
, откуда при KU=2,721,
R0=20
кОм, R=20 кОм, n=1, R·n=20 кОм имеем:
Выбираем: Ra=20кОм, ra=(0..5)кОм (подстроечный) — значение 3,248кОм.
Для компенсации влияния соединительных проводников схема смещения должна обеспечить тот же коэффициент усиления:
 ,
,
![]()
Выбираем Rd0=16кОм, rd=(0..3)кОм (подстроечный) — значение 1,21 кОм.
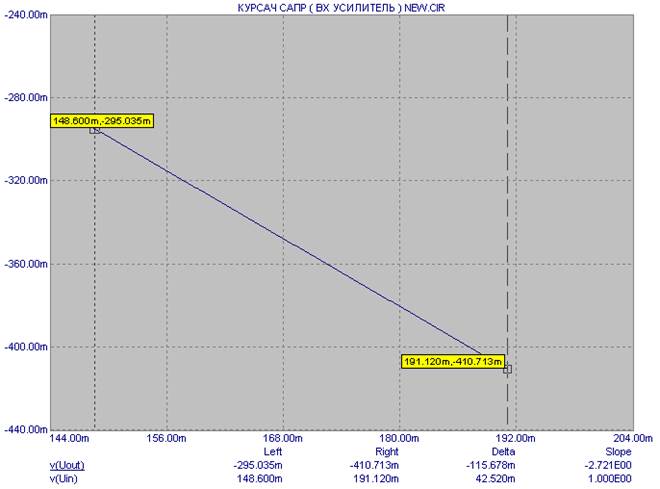
Рис.11. Характеристика входного усилителя.
5.5 Расчёт фильтра постоянной составляющей.
ФПС для данного ИП можно реализовывать либо в виде фильтра нижних частот (ФНЧ), либо в виде полоснозаграждающего фильтра (ПЗФ), настроенного на частоту 50 Гц. Выберем первый из этих вариантов. Так как высокая добротность в данном случае не требуется, выберем схему инвертирующего фильтра на основе ОУ с МОС.
С учетом допустимой погрешности всей схемы ИП (γдоп=0,5%) зададимся максимальной погрешностью (т.е отношением "помеха/полезный сигнал")на выходе фильтра δф=0,05% т.е. в 10 раз меньше предельно допустимого. Будем считать, что помеха и полезный сигнал на входе фильтра имеют одинаковый порядок по величине.
Тогда затухание ![]() ;
примем
;
примем  .
.
Согласно ГОСТ 13384-93 (СНГ) время установления выходного сигнала измерительных преобразователей для ТПС (время, в течение которого выходной сигнал преобразователей входит в зону предела допускаемой основной погрешности) должно выбираться из ряда: 0.05; 0.10; 0.15; 0.25; 0.4; 0.5; 1.0; 2.5; 5.0; 10; 30 с.
Для обеспечения приемлемой инерционности выберем частоту среза fc=1Гц. Ширина переходной области задаётся так, чтобы частота запирания удовлетворяла условию: (fc+Δf)≤50Гц. Отсюда получим Δf=49Гц.
Необходимый порядок фильтра
— при аппроксимации АЧХ полиномом Баттерворта
— при аппроксимации АЧХ полиномом Чебышева
Т.к. порядок фильтра в обоих случаях N=2, то для построения фильтра выберем полином Баттерворта.
Нормированные коэффициенты:
С учётом того, что коэффициент усиления на постоянном токе K0=1, имеем:
Выбираем Cf1=1мкФ, Cf2=4,3мкФ, Rf1= Rf2=100кОм, R f3=51кОм.
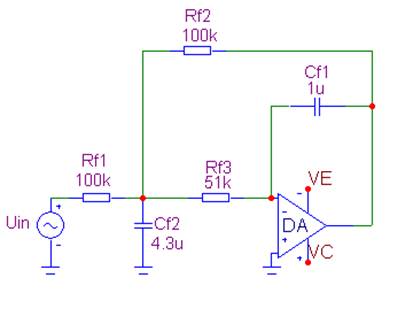
Рис.12. Модель ФПС (ФНЧ с МОС) в MicroCAP.
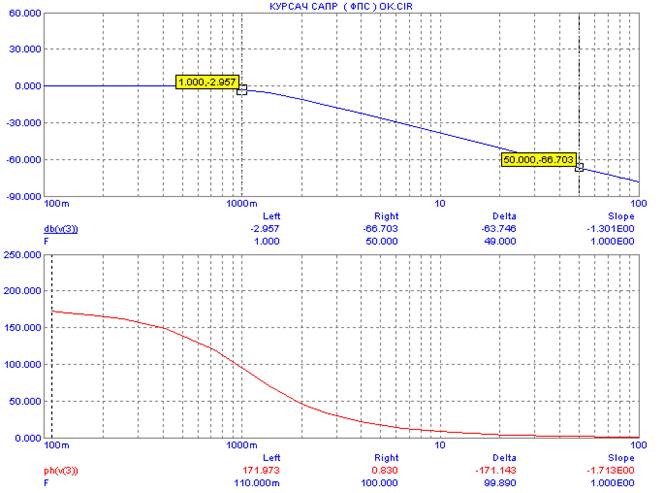
Рис.13. АЧХ и ФЧХ фильтра постоянной составляющей.
5.6 Выходной преобразователь.
Преобразователь выполним по схеме выше описанного источника тока.
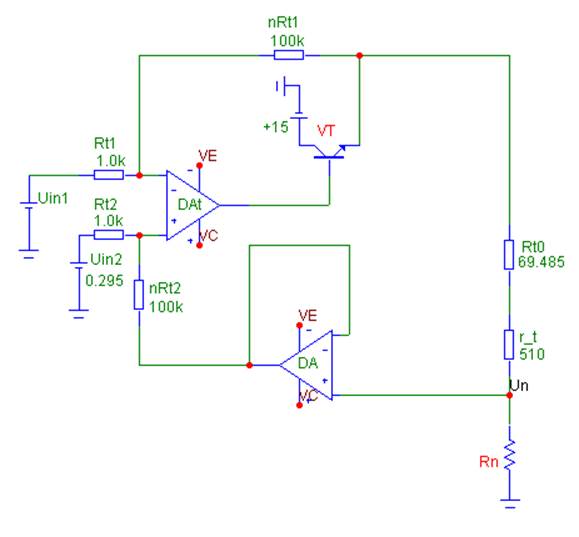
Рис.14. Выходной преобразователь.
Тогда выходной ток будет равен:
 ;
;
Из
последней формулы
выразим ![]() :
:
 при n=100.
при n=100.
Выбираем:
Rt0=510 Ом, rt=(0..100)Ом (подстроечный)— значение 69,5Ом
Rt1=Rt2=1 кОм , nRt1=nRt2= 100 кОм.
Для обеспечения заданного диапазона выходного тока применяется транзистор VT КТ315В (служит усилителем тока).
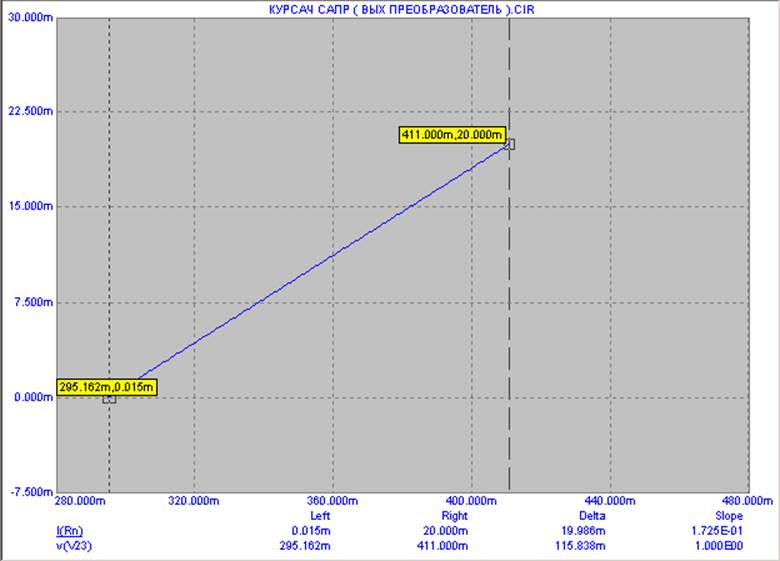
Рис.15. Характеристика преобразователя напряжение—ток.
5.7 Список компонентов, применяемых в электрической схеме
измерительногопреобразователя.
Постоянные резисторы ¾ С5-53Ф, Pном—0.125 Вт, ряд E192, допуск 0.05%, ТКС: ±10·10-6 ◦С-1 при t◦C=(-60..+70) ◦С.
Подстроечные резисторы ¾ С5-16ВБ ±5%.
R1 ¾ С14-0,125-22кОм ±1% ±35·10-6 ◦С-1
R2, R4 .. R7, R11, R13, R14, R17 .. R20 — С5-53Ф-0,125-20кОм ±0.05% ±10·10-6 ◦С-1
R3, R23, R24 ¾ С5-53Ф-0,125-1кОм ±0.05% ±10·10-6 ◦С-1 R8 ¾ С5-53Ф-0,125- 6,19кОм ±0.05% ±10·10-6 ◦С-1 R9 — С5-53Ф-0,125-10кОм ±0.05% ±10·10-6 ◦С-1 R10 — С5-16ВБ-0,125-4,7кОм ±5% R12 — С5-53Ф-0,125-10кОм ±0.05% ±10·10-6 ◦С-1
R15 — С5-16ВБ-0,125-2,2кОм ±5%
R20, R21, R25, R26 — С5-53Ф-0,125-10кОм ±0.05% ±10·10-6 ◦С-1 R22 — С14-0,125-52кОм ±1% ±35·10-6 ◦С-1
R27 — С5-16ВБ-0,125-200Ом ±5%
R28 — С14-0,125-510Ом ±1% ±35·10-6 ◦С-1
Конденсаторы ¾ К53-7±10%.
C1 ¾ К53-4,3 мкФ±10%
C2 — К53-1,0 мкФ±10%
Стабилитрон ¾ КС405.
VD1 ¾ КС405, Uст=6,2В.
Операционные усилители
DA1-DA11 ¾ К140УД17А.
Транзистор
VT1 ¾ КТ315
6. Анализ дополнительной погрешности измерительного преобразователя от влияния температуры окружающей среды
Дополнительная погрешность не должна превышать 0,25% от диапазона выходного сигнала т.е. 0,05мА на 10◦C (5 мкА на 1◦C).
Контроль этой погрешности в среде MicroCAP удобно проводить в режиме DCAnalysisгде по оси абсцисс откладывается температура, при которой функционирует электрическая схема, а измеряемая температура (в контрольных точках) задаётся через Steppingкак параметр T_ABS модели ТПС R_Cu.
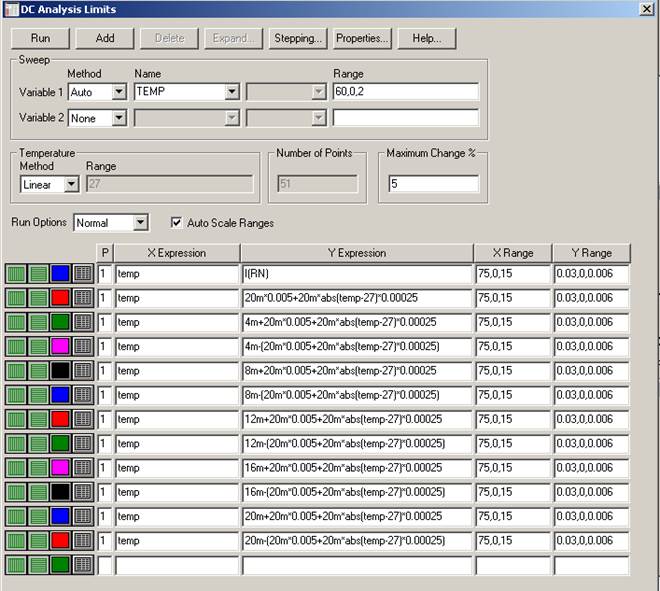
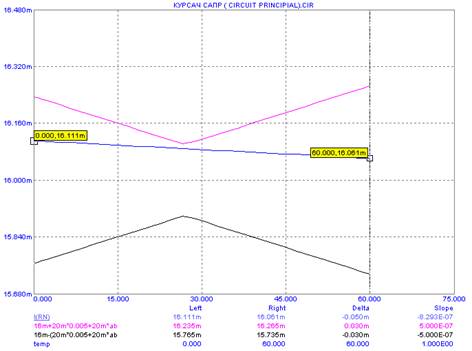
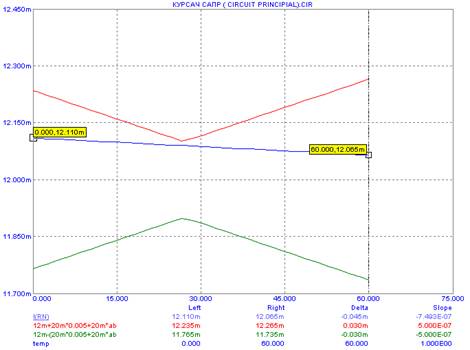
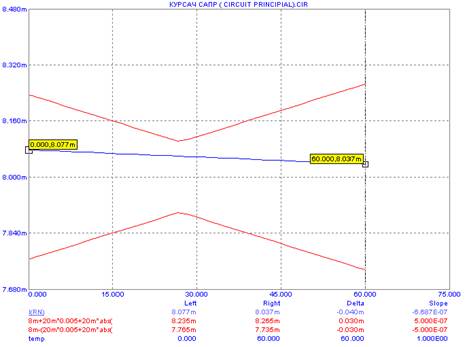
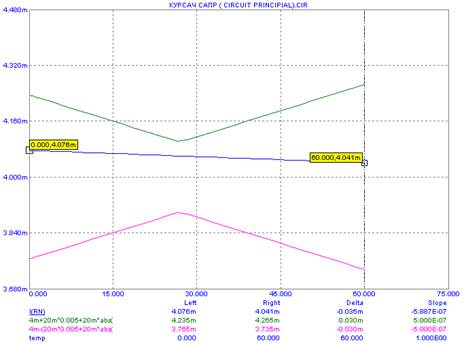
Рис.16. Моделирование дополнительной погрешности.
Как видно из графиков, нигде в заданном диапазоне измерения дополнительная погрешность не превышает предельно допустимую.
а) При измерении 120◦C:
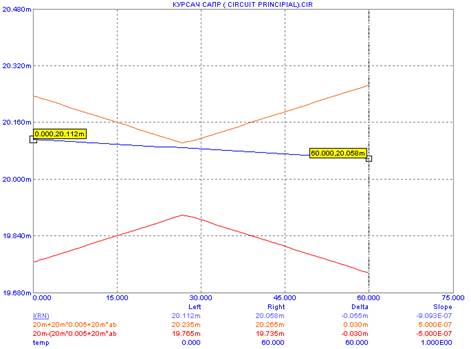
б) При измерении 100◦C:
в) При измерении 80◦C:
г) При измерении 60◦C:
д) При измерении 40◦C:
е) При измерении 20◦C:
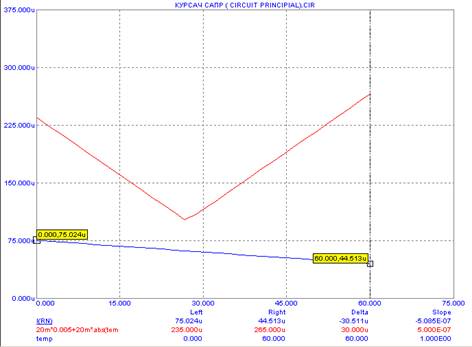
Рис.17 а)—г). Графики дополнительной погрешности.
7. Анализ основной погрешности измерительного преобразователя от влияния разброса компонентов
Для моделирования наихудшего случая разброса компонентов будем задавать сопротивления резисторов с изменённым масштабным множителем R. Зададим разные модели для резисторов, по отношению к номиналам которых передаточная функция прямо или обратно пропорциональна.
Максимально допустимая погрешность составляет по заданию 0,5% т.е. 0,1мА.
Для анализа соблюдения требований построим характеристику преобразования температуры в токовый сигнал.
Из построенных графиков следует, что полученная погрешность не превышает предельно допустимую.

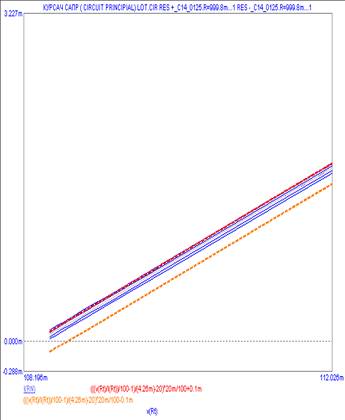
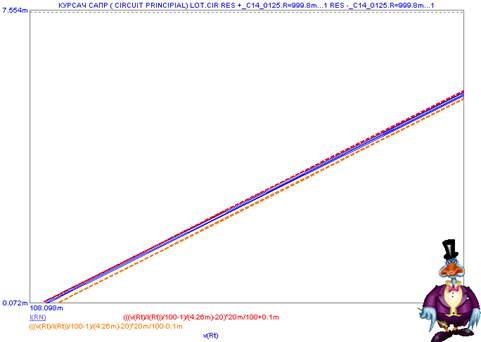
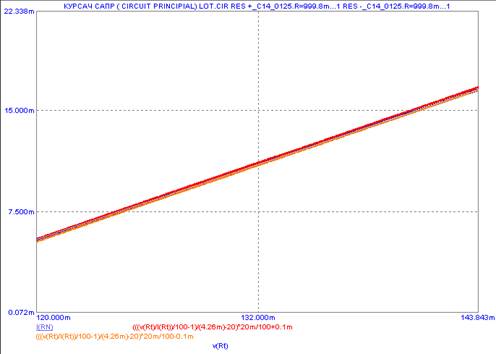
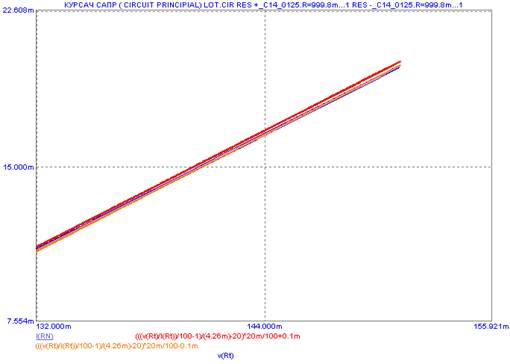
Рис.18. Графики иллюстрирующие влияние разброса компонентов.
8. Оценка погрешности от влияния Uз и Uпом
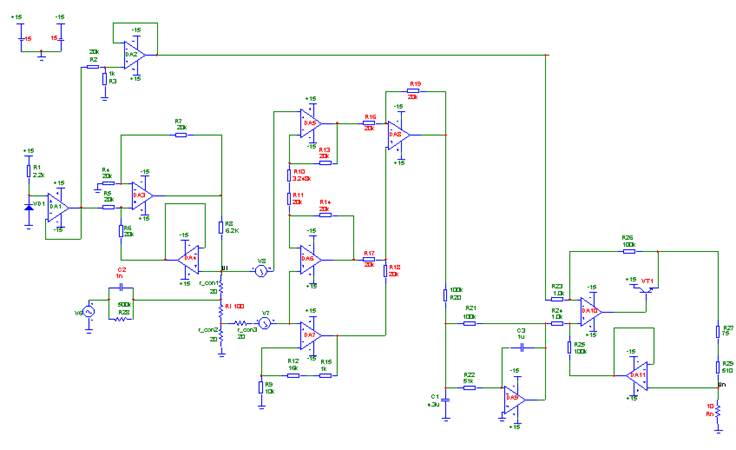
Рис.19. Моделирование помех в MicroCAP.
Из построенных графиков видно, что установление показаний в зону
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.