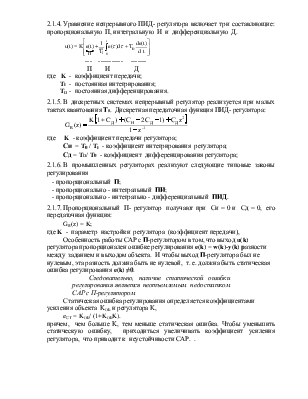
Цель работы: изучение особенностей дискретных регуляторов, аппроксимирующих аналоговые регуляторы и сравнение их с регуляторами, реализующими дискретные алгоритмы управления.
Для параметрически оптимизируемых систем это различные типы ПИД-регуляторов невысокого порядка. Для структурно оптимизируемых систем это апериодические АР- регуляторы и регуляторы состояния.
Применение дискретных регуляторов, аппроксимирующих аналоговые регуляторы позволяет использовать накопленный опыт работы с аналоговыми регуляторами и применять уже хорошо известные правила настройки их параметров.
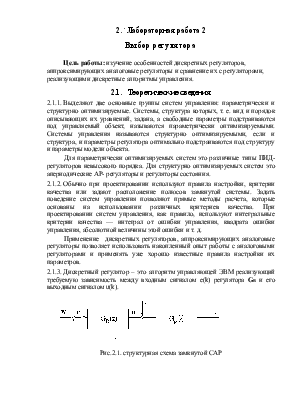
Рис.2.1. структурная схема замкнутой САР
--- ----------- ------П И Д
где K - коэффициент передачи;
TI - постоянная интегрирования;
TD - постоянная дифференцирования.

где K - коэффициент передачи регулятора;
Си = T0 / TI - коэффициент интегрирования регулятора;
Сд = TD/ T0 - коэффициент дифференцирования регулятора;
- пропорциональный П;
- пропорционально - интегральный ПИ;
- пропорционально - интегрально - дифференциальный ПИД.
GR(z) = K;
где K - параметр настройки регулятора (коэффициент передачи),
Особенность работы САР с П-регулятором в том, что выход u(k) регулятора пропорционален ошибке регулирования e(k) =w(k)-y(k) разности между заданием и выходом объекта. И чтобы выход П-регулятора был не нулевым, эта разность должна быть не нулевой, т. е. должна быть статическая ошибка регулирования e(k) ≠0.
Следовательно, наличие статической ошибки регулирования является неотъемлемым недостатком САР с П-регулятором
Статическая ошибка регулирования определяется коэффициентами усиления объекта KОБ и регулятора K,
eСТ = KОБ/ (1+KОБK).
причем, чем больше K, тем меньше статическая ошибка. Чтобы уменьшить статическую ошибку, приходиться увеличивать коэффициент усиления регулятора, что приводит к неустойчивости САР. .
где K и Си = T0/TI - параметры настройки регулятора.
Пропорционально- интегральный регулятор сочетает в себе достоинства П- и И-законов регулирования: пропорциональная составляющая обеспечивает достаточное быстродействие регулятора, а интегральная - ликвидирует статическую ошибку.

где K, Сд = TD/T0 и Си = T0/TI - параметры настройки регулятора.
 |
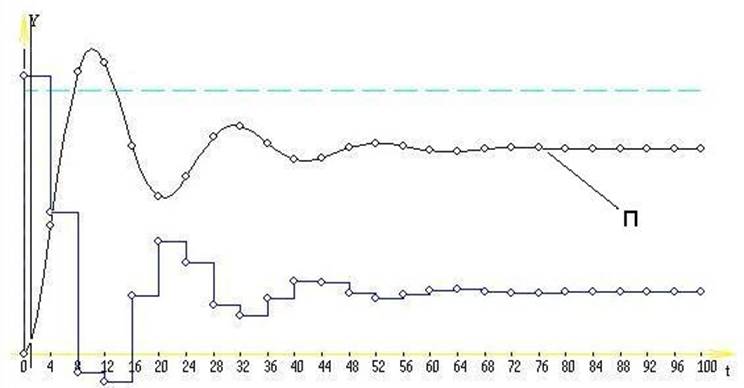
На Рис.2.2. приведены для сравнения процессы регулирования объекта различными регуляторами

здесь а1 . . . аm, b1. . . bm- параметры передаточной функции объекта.
Из передаточной функции АР-регулятора следует, что его параметры рассчитываются по известным параметрам объекта регулирования.
Таким образом, АР-регулятор не требует настроек своих параметров как ПИД-регулятор, но требует точных параметров объекта.
|
Вариант объекта |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
№ объекта |
5 |
1 |
5 |
2 |
4 |
3 |
1 |
2 |
3 |
4 |
|
Вариант парам |
9 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Постоянная Т1 |
22 |
15 |
10 |
20 |
12 |
16 |
18 |
24 |
20 |
15 |
|
Постоянная Т2 |
10 |
6 |
6 |
8 |
5 |
9 |
6 |
8 |
6 |
5 |
|
Пост. Т3 (числ.) |
4 |
3 |
2 |
4 |
2 |
3 |
3 |
4 |
3 |
2 |
|
Коэф. затухания e |
0,2 |
0,4 |
0,2 |
0,3 |
0,5 |
0,4 |
0,3 |
0,5 |
0,3 |
0,4 |
|
Дин. ошибка eдин< |
0,3 |
0,2 |
0,4 |
0,3 |
0,2 |
0,4 |
0,3 |
0,2 |
0,4 |
0,3 |
|
Макс.упр. U(0)< |
4 |
5 |
6 |
7 |
5 |
8 |
7 |
5 |
6 |
7 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.