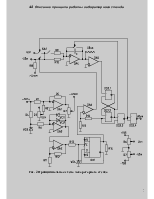
выполнен на операционном усилителе DA4, конденсаторе С1, резисторах R9,R10 и представляет собой интегрирующий усилитель с двумя входами: 1-для входного напряжения; 2-для опорного напряжения.
Схема управления коммутирует напряжения UВХ и UОП соответствующим образом, в результате чего на выходе DA4 формируется следующий сигнал:
В момент времени t0 (точка 1) на вход АЦП подается UВХ и усилитель интегрирует его до тех пор пока схема управления не отключит UВХ и не подключит опорное напряжение UОП (точка 2).Интегрирующий усилитель запоминает напряжение U (точка 2) а затем интегрирует напряжение UОП с отрицательным наклоном (т.к. усилитель инвертирующий). Этот процесс продолжается до тех пор, пока UВЫХ(t) не достигнет нуля (точка3). Нулевое напряжение отслеживает компаратор на ОУ DA5 , который передает в схему управления импульсы сброса на RS-триггер (вход R). Как уже говорилось выше длительность импульса Т2 - информационная, т.к. зависит от уровня UВХ. Однако удобнее ее измерять не по осциллограмме UВЫХ(t) АЦП, а сначала выделить ее и преобразовать в прямоугольный импульс длительностью Т2. Это и делает схема управления, а импульс снимается с выхода элемента DD2.4
Написать формулу для расчета погрешности
5.1. Ознакомиться с устройством стенда. Изучить назначение ручек переменных резисторов, которое являются следующим:
'-UВХ '- регулировка уровня входного напряжения АЦП в пределах 0В-Uпит;
'-UОП '- регулировка уровня опорного напряжения АЦП в пределах 0В-Uпит;
'~UПОМ '- регулировка амплитуды напряжения сигнала помехи с частотой f=50Гц;
'UСМ '- регулировка величины постоянного напряжения смещения сигнала помехи;
Tумблером SA1 можно изменять постоянные времени интегрирующего усилителя (Т1,Т2). После ознакомления с элементами управления, подать на стенд питание (+11V..13V,-11V..13V). Подавать 15V не рекомендуется во избежании «защелкивания» элементов DD2.1-DD2.4, которые выполнены по КМОП-технологии. Затем, изменяя '-UВХ' зарисовать форму входного и выходного напряжений для двух различных значений -UВХ. UОП установить в пределах 7V-10V
5.2. Не подавая на вход АЦП сигнал помехи, снять передаточную характеристику (8-10 точек) АЦП при измерении сигнала постоянного тока. Рассчитать погрешность преобразователя d и данные занести в Табл. 1.
Табл. 1
|
N п.п. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
UВХ, В |
|||||||||
|
ТВЫХ, мС |
|||||||||
|
КПР |
|||||||||
|
d, % |
5.3. Подать на вход ~ UПОМ сигнал помехи (соединить соответствующие гнезда перемычками) с частотой, кратной частоте преобразователя (fПР=25 Гц) и снять передаточную характеристику АЦП при измерении сигнала постоянного тока при наличии сигнала помехи. Рассчитать погрешность d преобразователя и данные занести в Табл. 2.
Табл. 2
|
N п.п. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
UВХ, В |
|||||||||
|
ТВЫХ, мС |
|||||||||
|
КПР |
|||||||||
|
d, % |
5.4. Изменить тумблером SA1 постоянную времени АЦП и снять передаточную характеристику при измерении сигнала постоянного тока при наличии сигнала помехи и при изменении параметров интегратора. Рассчитать погрешность d преобразователя и данные занести в Табл. 3.
Табл. 3
|
N п.п. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
UВХ, В |
|||||||||
|
ТВЫХ, мС |
|||||||||
|
КПР |
|||||||||
|
d, % |
5.5. Вернуть тумблер SA1 в исходное состояние («Т1»), подать на вход «-UПОМ» сигнал помехи и установить регулятором «UСМ» напряжение смещения и снять передаточную характеристику при измерении сигнала постоянного тока при наличии сигнала помехи и при наличии напряжения смещения. Рассчитать погрешность d преобразователя и данные занести в Табл. 4.
Табл. 4
|
N п.п. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
UВХ, В |
|||||||||
|
ТВЫХ, мС |
|||||||||
|
КПР |
|||||||||
|
d, % |
5.6. Подать на вход «-UПОМ» сигнал помехи от генератора с частотой, не кратной частоте преобразователя (fПР=25Гц) и убрать регулятором «UСМ» напряжение смещения и снять передаточную характеристику при измерении сигнала постоянного тока при наличии сигнала помехи, некратной частоте прямого интегрирования. Рассчитать погрешность d преобразователя и данные занести в Табл. 5.
Табл. 5
|
N п.п. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
UВХ, В |
|||||||||
|
ТВЫХ, мС |
|||||||||
|
КПР |
|||||||||
|
d, % |
5.7. По результатам выполнения предыдущих пунктов построить на одном листе в одном масштабе графики ТВЫХ=f(UВХ) для всех пяти случаев.
5.8. Результаты выполнения всех пунктов свести в сводную Табл. 6 .
Табл. 6
|
Вид воздействующих сигналов |
UВХ-пост. UПОМ=25-нет UПОМ¹25 -нет UСМ- нет ТИНТ=Т1 |
UВХ-пост. UПОМ=25-есть UПОМ¹25 -нет UСМ- нет ТИНТ=Т1 |
UВХ-пост. UПОМ=25-есть UПОМ¹25 -нет UСМ- нет ТИНТ=Т2 |
UВХ-пост. UПОМ=25-есть UПОМ¹25 -нет UСМ- есть ТИНТ=Т1 |
UВХ-пост. UПОМ=25-нет UПОМ¹25 -есть UСМ- нет ТИНТ=Т1 |
|
КПР |
|||||
|
d, % |
5.9. Сделать вывод о точности, стабильности, помехоустойчивости и быстродействии АЦП, построенных по принципу двойного интегрирования.
Отчет должен содержать основные теоретические сведения, результаты
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.