




















МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИАНАЛЬНОГО ОБРАЗОВАНИЯ
УФИМСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЯНОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Курс лекций по дисциплине:
Часть 1,
Уфа 2007
1
Содержание
1 . Автоматизированные ЭП типовых ГМ и ПК.![]() З
З
2. Основные понятия и определения.
........................![]() З
З
2.1
Функции
автоматизированных ЭП на базе ДПТ..![]() 4
4
2.1.1.
пуск..![]() 5
5
2.1.2.
Торможение. .![]() 5
5
2.1.3.Рекуперативное
торможение......................................................![]() 5
5
2.1.3.
Торможение
противовключением.![]() 6
6
2.1.5.
Динамическое
торможение .![]() 7
7
2.1.6.
Реверс.![]() 7
7
2.1.7.
Регулирование
координат (скорости вращения).![]() 7
7
2.1.8.Реостатное регулирование .![]() 8
8
2.1.9.Регулирование изменением магнитного потока
возбуждения .![]() 8
8
2.1.10.Регулирование изменением напряжения,
подводимого к якорю![]() 9
9
2. 2.АЭП с ДПТ по системе Г-Д.![]() 10
10
2.2.1 Регулирование угловой скорости в разомкнутой
системе Г-Д..![]() 11
11
2.2.2.Пуск в системе Г-Д..![]() 12
12
2.2.3.Торможение в системе Г-Д.![]() 13
13
2.2.4.Рекуперативное
торможение..........................................................................![]() 14
14
2.2.5. Торможение противовключением.![]() 15
15
2.2.6.Реверс.![]() 16
16
2.2.7.Преимущества и недостатки системы Г-Д .![]() 16
16
2.2.8.Системы Г-Д с обратными
связями..................................................... ... . .![]() 17
17
2.3..АЭП постоянного тока по системе УСП-Д.![]() 18
18
2.3.1. Управляемые выпрямители..![]() 18 2.3.2.Работа мостового трехфахного
УВ ... ....
18 2.3.2.Работа мостового трехфахного
УВ ... ....![]()
2.3.3.Работа мостового трёхфазного выпрямителя в управляемом
режиме при а ![]() 25
25
2.3.4.Работа УСП в режиме инвертирования. .![]() 27
27
2.3.5. Условия перехода из режима выпрямления в режим
инвертирования ... ... ... ... ... ..... 27 2.3.6.Гармонический состав
выходного напряжения и тока УСП.![]()
2.3.8. Анализ гармонического состава потребляемого тока. ..............................................31
2.3.9.Энергетические показатели УВ. .![]() 32
32
2.3.10. Система управления выпрямителями. .![]() 34
34
2. 4.Электромагнитные СИФУ .![]() 35
35
2.4.1 Электромагнитные ФСУ .![]() 35
35
2.4.
2.Электромагнитный
формирователь импульсов .![]() 35 2.4.3 .Полупроводниковые СИФУ..
35 2.4.3 .Полупроводниковые СИФУ..![]() 37 2.4.4.Работа системы УСП-Д в
двигательном режиме. .
37 2.4.4.Работа системы УСП-Д в
двигательном режиме. .![]()
2.4.5.Регулирование скорости вращения. ...........................................................................39
2.4.6.Пуск в системе УСП-Д.![]() 41
41
2.4.7. Тормозные режимы УСП-Д![]() 42
42
2.4.
8.Преимущества и
недостатки систем УСП-Д по сравнению с системой ГД.![]() 44
44
2.5.
Автоматизированный
электропривод постоянного тока по системе ПШР-Д.![]() 45
45
1.Автоматизированный ЭП типовых ПМ и ПК.
2.0сновные понятия и определения.
Автоматизированный ЭП совокупность электрических, электромеханических, логических, алгоритмических и т.д. устройств, предназначенных для автоматизированного выполнения следующих функций:
2. регулирование координат (скорости, момента, положения) в заданных пределах;
З . торможение;
4. реверс;
В качестве основных задач АЭП рассматриваются:
- точное соблюдение технологического режима;
- энергосбережение;
- экологичность и безопасность;
При рассмотрении того или иного вида автоматического ЭП мы будем рассматривать устройство, принцип действия автоматизированных систем, возможные варианты схем, качество выполнения перечисленных функции и их показатели: классические, технико-экономические, потребительские и т.д..
Автоматизированный ЭП с ДПТ.
Автоматизированный ЭП с ДПТ до недавнего времени было принято относить к единственному типу регулируемых ЭП, в частности в ПУЭ до сих пор применительно к области использования ДПТ существует следующая формулировка: «ДПТ предназначены для использования регулируемых ЭП».
В настоящее время эта формулировка устарела, но несомненным, является то, что ЭП с ДПТ и по сей день — является наиболее динамичным видом ЭП, позволяющим непосредственно управлять моментом двигателя.
2.1.Функции автоматизированных ЭП на базе ДПТ.
К ним относятся (основные функции):
2. торможение
З . регулирование координат (скорости, момента)
4. реверс
З
2.1.1. пуск.
Пуск - переходный процесс при изменении скорости двигателя от 0=0, до о=оном .
Основными задачами, которые выполняют автоматизированный ЭП, в процессе пуска является разгон ЭД в заданный промежуток времени при обеспечении плавности и отсутствии термической перегрузки. При этом, в процессе пуска должно поддерживается постоянство М , М2 (пиковых моментов и моментов переключения) и IПУСК <2+251НОЛИ .
Существуют 2 принципиальные возможности такого пуска: 1 . реостатный
2. пуск при пониженном напряжении реостатный пуск управляется: в функции времени в функции тока в функции напряжения в функции момента в функции угловой скорости
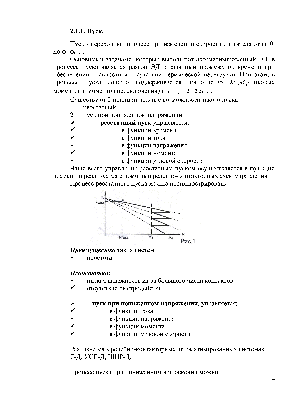
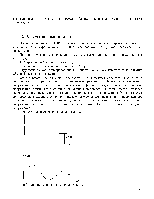
Чаще всего управление реостатным пуском осуществляется в функции времени и реализуется с помощью релейно-контакторных схем управления. Процесс реостатного пуска можно проиллюстрировать:
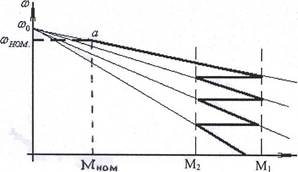 м
м
Рис. 1 Преимущество таких систем: простота
НеДостатки:
низкая надёжность из-за большого числа контактов отсутствие быстродействия
пуск при пониженном напряжении, управляется: в функции тока в функции напряжения в функции момента в функции угловой скорости
Реализуется в релейно-контакторных автоматизированных системах Г-Д, УСП-Д, ШШо -Д.
Процесс пуска при пониженном напряжении можно
проиллюстрировать:
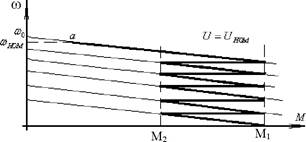
Рис.2
Преимущества:
![]() v/ количество ступеней не ограниченно v/
значительно легче поддерживается постоянство М , М v/ наиболее
плавный пуск v/ меньше износ двигателя
v/ количество ступеней не ограниченно v/
значительно легче поддерживается постоянство М , М v/ наиболее
плавный пуск v/ меньше износ двигателя
НеДостатки:
v/ большая первоначальная стоимость оборудования
2.1.2. Торможение.
В процессе торможения АЭП выполняет следующие задачи:
v/ быстрая и точная остановка двигателя в заданное время при условии минимизации потерь мощности и минимизации термической перегрузки двигателя.
В автоматизированных системах с ДПТ используется З способа торможения:
1. рекуперативное торможение
2. торможение противовключением З . динамическое торможение 4.
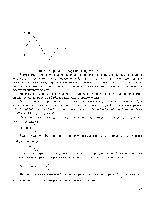
2.1.3.Рекуперативное торможение
Рекуперативное торможение легко
реализуется в системе Г-Д, ![]() системах
ШИР-Д, УСП-Д значительно сложнее.
системах
ШИР-Д, УСП-Д значительно сложнее.
Рекуперативное торможение управляется чаще всего f = [/(M)] .
Реализуется:
- понижением напряжения на зажимах якоря, первый скачок должен быть таким, чтобы рабочая точка переместилась во второй квадрант координатной плоскости.
-
 дальнейшее изменение напряжения должно быть таким, чтобы
рабочая точка невыходила за пределы второго квадранта.
дальнейшее изменение напряжения должно быть таким, чтобы
рабочая точка невыходила за пределы второго квадранта.
Рис.З
Преимущества:
v/ высокая энергетическая эффективность (за счёт рекуперации преобразованной энергии) плавность v/ возможность управлять технологическим процессом
НеДостатки:
v/ сложность реализации остановки двигателя в рекуперативном режиме
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.