Прикладная механика – наука, изучающая движение и напряженное состояние реальных технических объектов, находящихся под действием приложенных к ним внешних сил.
Выполнение курсового проекта по дисциплине «Прикладная механика» - первая самостоятельная творческая работа студента, в ходе которой возникает много трудностей и противоречий. К ним относятся установление последовательности выполнения работы, правильность конструирования узлов и деталей и всей конструкции в целом, выбор системы смазки, выполнение условий сборки.
В курсовом проекте необходимо спроектировать привод общепромышленного назначения – привод механизма поворота фары. Для этого необходимо выбрать и рассчитать на прочность и изгиб основные узлы и детали, разработать чертежи.
Целью проекта является разработка наиболее эффективной конструкции привода с экономичной и технологической точек зрения. Конструкция привода должна как можно ближе подходить к заданным условиям работы.
Механические устройства, применяемые для передачи энергии от источника к потребителю с изменением угловой скорости или вида движения, смонтированные в отдельном корпусе, называются редукторами. Необходимость введения передачи между двигателем и производственной машиной объясняется тем, что источники энергии (двигатели) обычно работают в режиме высоких угловых скоростей, обеспечивающих им наибольшие мощность, КПД и малые габариты; угловая скорость производственных машин обычно отличается от угловой скорости вала двигателя.
Задание.
Спроектировать привод механизма поворота фары.
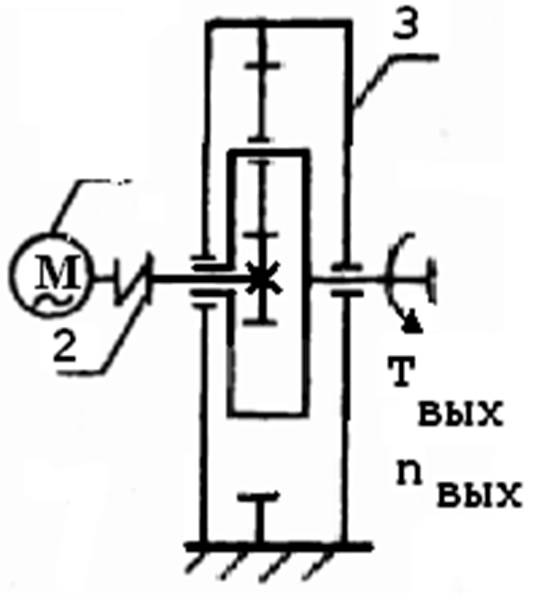 1.Электродвигатель.
1.Электродвигатель.
2. Муфта.
3. Редуктор планетарный.
Характеристики:
![]()
![]()
![]()
![]() ,
,![]() – соответственно крутящий момент
и частота вращения выходного вала;
– соответственно крутящий момент
и частота вращения выходного вала;
![]() –
ресурс работы привода.
–
ресурс работы привода.
Режим нагружения особо легкий.
В редукторе предусмотреть устройство для выравнивания нагрузки по потокам.
Разработать: 1. Сборочный чертёж редуктора.
2. Рабочие чертежи деталей.
3. Общий вид привода
2. Кинематический расчет.
2.1. Выбор электродвигателя.
Потребляемая мощность приводного электродвигателя при номинальной нагрузке:
![]()
где ![]() и
и ![]() - мощность,
соответственно на входном и выходном валах привода;
- мощность,
соответственно на входном и выходном валах привода;
Мощность на выходном валу:
![]()
где
![]() - угловая скорость выходного
вала привода, с-1.
- угловая скорость выходного
вала привода, с-1.
![]()
тогда ![]()
С учетом КПД привода имеем:
![]() .
.
Полученные значения ![]() округляют до ближайшего большего значения стандартного
электродвигателя.
округляют до ближайшего большего значения стандартного
электродвигателя.
Принимаем:
![]() .
.
Определяем частоту вращения вала двигателя:
![]() мин-1.
мин-1.
![]() мин-1.
мин-1.
Целесообразно выбрать
синхронный двигатель АИР
ДП 105-40-3-12
с
![]() .
.
С учетом скольжения ротора частота вала будет равна
![]() .
.
2.2. Подбор чисел зубьев колес планетарной передачи А.
Передаточное отношение механизма:
![]()
Представим ![]() в виде диапазона от
в виде диапазона от ![]() до
до ![]() с
отклонением от номинального значения
с
отклонением от номинального значения ![]() .
.
![]()
![]()
![]()
Этот диапазон представим в виде ряда с шагом 0.06:
5,76;5,82;5,88;5,94;6,00;6,06; 6,12;6,18;6,24.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
а затем в виде дробей:
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() ,
,
![]() .
.
Примем
![]() .
.
Определяем максимальное число сателлитов:

Округляем до ближайшего меньшего целого значения, получим:
![]()
Подбор чисел зубьев производим по основному уравнению:
![]()
где ![]() - число зубьев солнечного колеса
«а»;
- число зубьев солнечного колеса
«а»;
![]() - число зубьев сателлита «g»;
- число зубьев сателлита «g»;
![]() - число зубьев корончатого колеса
«b».
- число зубьев корончатого колеса
«b».
После подстановки ![]() и
и ![]() ,
получим:
,
получим:
![]() .
.
![]() должно
быть кратно 3.
должно
быть кратно 3.
![]() ;
; ![]() ;
;
![]()
![]() ;
; ![]() ;
;
![]()
![]() ;
; ![]() ;
;
![]()
Последний вариант подходит по всем параметрам, таким образом принимаем:
![]() ;
; ![]() ;
;
![]() ,
, ![]()
Произведем проверку:
1). Передаточное отношение:
![]() .
.
2). Условие соосности:
![]()
![]()
![]()
3). Условие соседства:
![]()
![]()
![]()
4). Условие сборки:
![]() - целое число.
- целое число.
2.3. Определение угловых скоростей звеньев планетарной передачи.
Существует единое правило для определения передаточного отношения любого планетарного механизма: передаточное отношение от любого подвижного центрального колеса планетарной ступени к водилу «h» равно единице минус передаточное отношение в обращенном движении (при «остановленном» водиле) от этого же колеса к неподвижному.
![]()
При остановке водила угловые скорости равны:
![]()
![]()
![]()
где ![]() - угловая скорость водила
- угловая скорость водила
![]()
![]()
![]()
Определим частоту вращения звеньев относительно водила «h»:
![]()
![]()
![]()
3. Силовой расчет планетарной передачи.
3.1. Выбор материала и термообработки зубчатых колес.
Принимая во внимание постоянный режим работы и её большой ресурс, примем материалы:
Для всех колес – сталь 45, термообработка – улучшение (280 – 320Мпа);
3.2. Выбор допускаемых контактных напряжений.
Для передачи ![]() расчёт ведётся
для ступени “a-g”.
расчёт ведётся
для ступени “a-g”.
Определим допускаемые контактные напряжения для колеса ''а''.
![]()
![]() - допускаемое контактное
напряжение.
- допускаемое контактное
напряжение.
![]() - предел контактной выносливости
поверхности зубьев, соответствующий базовому числу циклов напряжений.
- предел контактной выносливости
поверхности зубьев, соответствующий базовому числу циклов напряжений.
![]() - коэффициент долговечности,
учитывающий влияние срока службы и режима нагружения передачи.
- коэффициент долговечности,
учитывающий влияние срока службы и режима нагружения передачи.
![]() - коэффициент безопасности,
интегрально учитывающий приближённый характер метода расчёта (
- коэффициент безопасности,
интегрально учитывающий приближённый характер метода расчёта (![]() ).
).
![]()
![]() - твёрдость материала.
- твёрдость материала.
![]() (МПа)
(МПа)
![]() - базовое число циклов
напряжений, соответствующих пределу выносливости.
- базовое число циклов
напряжений, соответствующих пределу выносливости.
![]()
![]() - расчётное число циклов
перемены напряжения.
- расчётное число циклов
перемены напряжения.
![]()
![]()
![]() - относительная частота вращения
рассчитываемого колеса.
- относительная частота вращения
рассчитываемого колеса.
![]() - число колёс, находящихся в
зацеплении с рассчитываемым.
- число колёс, находящихся в
зацеплении с рассчитываемым.
![]() - ресурс работы передачи.
- ресурс работы передачи.
т.к. режим работы
особо легкий , то ![]()
![]()
![]()
Примем ![]() .
.
![]() (МПа).
(МПа).
Определим допускаемые контактные напряжения венца сателлита “g”:
![]()
![]() (МПа)
(МПа)
![]()
![]()
![]()
![]()
Принимаю ![]() =0,75
=0,75
![]()
3.3. Выбор допускаемых напряжений изгиба.
Определим допускаемые напряжений на изгиб солнечного колеса “а”:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.