



3. Использование компьютерных технологий в проектировании изделия
Существующие в данное время системы автоматизированного проектирования позволяют значительно ускорить процессы разработки и конструирования горных машин. Время разработки таких машин существенно сокращается за счет применения мощных программных средств вычислительной техники. Новые проектные технологии позволяют повышать надежность и качество продукции, снижая при этом стоимость затрат на проектирование.
При выполнении проектных расчетов по выбору рациональных параметров разрабатываемого изделия, а также при разработке конструкторской документации проекта на добывающую машину, необходимо многократно выполнять типовые проектные процедуры анализа, оптимизации, синтеза и моделирования. Использование средств вычислительной техники позволяет также существенно ускорить и процесс функционального проектирования добывающей машины, сократить затраты труда рассчетников, повысить точность расчетов и качество проектирования в целом.
При этом для достижения эффекта от применения средств вычислительной техники необходимо создать автоматизированную подсистему функционального проектирования добывающей машины, которая включает программные модули-приложения, обеспечивающие выполнение процедур моделирования их важнейших эксплуатационных свойств, расчета, анализа и оптимизации основных проектных параметров машины и её составных частей, синтеза схем функциональных систем объекта проектирования.
С применением ЭВМ в рамках АПФП выполняются все виды расчетов по данной машине, разрабатывают конструкторскую документацию, прогнозируют ее надежность, наблюдают рабочий процесс в динамике, строят графики изменения значений одних физических величин от ряда исследуемых параметров добывающей машины, привлекая при этом возможности других программных приложений, таких как Matlab, MathCAD, MAPLE – системы символьной математики, Excel – программное обеспечение для создания электронных таблиц и графических иллюстраций, а также универсальных программных приложений инженерного анализа (CAЕ) – Pro/ Меchanika, EUCLID, ANSYS, NASTRAN и другие.
При разработке проектной и рабочей конструкторской документации используются САПР AutoCAD, КОМПАС, Solid Works, T-Flex и другие, позволяющие автоматизировать конструкторский аспект проектирования. В дипломном проекте представлены чертежи, созданные с помощью САПР КОМПАС.
Примера проблемной проектной задачи при создании экскаватора может быть следующая. Причем решение ее наиболее успешно может быть найдено только при использовании процедур многовариантного анализа кинематики и динамики наполнения и разгрузки ковша в функции проектных, конструктивных и режимных параметров стрелового механизма.
Машинист одноковшового экскаватора в течение одного цикла выполняет 12-18 операций, совершая 90 движений в минуту. Ручное управление экскаватором при мгновенных изменениях условий работы затрудняет эффективное ведение процесса, уменьшает производительность машины. Выполнение рабочих операций на высоких скоростях, особенно в сложных условиях и к концу смены, сказывается на физических возможностях человека, поэтому разница в производительности экскаватора, управляемого разными машинистами, может достигать 40%. Длительность рабочего цикла одноковшового экскаватора может быть существенно сокращена, а его производительность увеличена при автоматизации управления.
Как известно, рабочий процесс прямой лопаты является циклическим и складывается из операций копания, транспортирования ковша к месту выгрузки, разгрузки ковша и возврата порожнего ковша к месту наполнения.
Процесс копания прямой лопатой осуществляется координированной работой механизмов подъема и напора экскаватора, причем силовую функцию копания выполняет механизм подъема, а с помощью механизма напора производится управление процессом. Координация работы механизмов подъема и напора должна обеспечивать: планировку забоя, соответствие величины заглубления ковша мощности механизма подъема, крепости разрабатываемого материала и высоте забоя.
Процесс транспортирования и разгрузки ковша экскаватора представляет собой совокупность рабочих движений экскаватора, осуществляемых посредством трех основных приводов: поворота, подъема и напора. Взаимодействие этих механизмов должно обеспечить максимальное совмещение рабочих движений, оптимальные режимы разгона и торможения, а также остановку ковша в заданной точке пространства требуемой точностью.
Анализ управления одноковшовым экскаватором показывает, что логика управления им весьма сложна, количество используемой информации велико, а качественные технические средства получения этой информации отсутствуют. Поэтому в настоящее время ведутся работы по созданию комбинированных систем управления, сочетающих достоинства управления человеком-оператором и микропроцессором.
Такие системы основаны на иерархическом принципе с двумя уровнями управления. На верхнем уровне машинист осуществляет формирование и контроль выполнения программы работы электроприводов экскаватора, а также непосредственно управляет основными приводами в отдельных фазах рабочего процесса. При выполнении процесса копания с помощью микропроцессора определяются и передаются на входы систем управления приводами подъема и напора программы движения этих механизмов на всех фазах копания, начальные и конечные координаты траектории и т.д. При выполнении процесса транспортирования определяются лимитирующая операция, программа движения всех механизмов, координаты начала торможения и т. д.
На нижнем уровне включаются локальные системы управления главными приводами экскаватора, которые работают по заданиям и программам верхнего уровня в тех фазах рабочего процесса, когда требуется выполнение достаточно точных и быстрых управляющих воздействий и когда все разнообразие производственных ситуаций может быть учтено программой работы, задаваемой верхним уровнем.
Контроль за выполнением программ и корректировка траекторий движения всех механизмов, особенно в начальных и конечных стадиях, принадлежат машинисту и останутся за ним, по-видимому, при любом уровне автоматизации современного экскаватора.
Для решения сформулированной качественно проектной задачи необходимо разработать расчетную динамическую систему стрелового механизма, составить уравнения движения, решить полученную систему при наложенных условиях – ограничениях на качественные и режимные параметры, выполнить анализ машинного расчетного эксперимента, принять обоснованный критерий и записать функцию цели оптимизации, а затем установить оптимальные проектные параметры, которые затем и будут реализованы в конструкции. Именно все это и позволяет реализовать АПФП экскаватора.
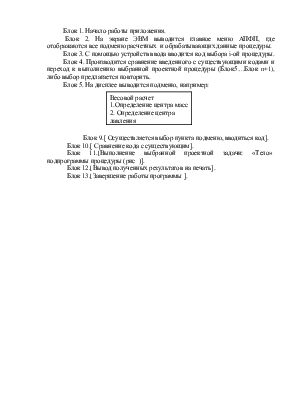
На рисунке представлена схема АПФП экскаватора одноковшового
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.