Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования «сибирский государственный технологический Университет»
Факультет: Механический
Дисциплина: Детали машин
КУРСОВОЙ ПРОЕКТ
Тема: Проектирование привода цепного транспортера
ПОЯСНИТЕЬНАЯ ЗАПИСКА
(КП.КМ.00.00.00.1.1.03.ПЗ)
Руководитель:
_____________/ /
(подпись)
____________________________
(оценка, дата)
Выполнил:
студент гр. 92-05
___________/ /
(подпись)
Красноярск 2006
Содержание
Задание на курсовую работу…………………………………………………….3
Ведение……………………………………………………………………………4
Техническая характеристика привода…………………………………………..5
1. Кинематический расчёт синтез передаточного механизма. Выбор электродвигателя…………………........................................................................6
2. Расчет открытой ременной передачи………………………………………..9
3. Расчет закрытой передачи……………………………………………………13
3.1. Выбор материалов и допускаемых напряжений элементов цилиндрической косозубой передачи……………………………………...….13
3.2. Расчет закрытой цилиндрической косозубой передачи……………….....14
3.3. Выбор материалов и допускаемых напряжений элементов цилиндрической прямозубой передачи………………………………………..18
3.4. Расчет закрытой цилиндрической прямозубой передачи………………..19
4. Предварительный расчет валов……………………………………………...24
5. Предварительный выбор подшипников…………………………………….29
6. Конструктивные размеры колес и корпуса редуктора……………………..30
7. Подбор и расчет шпоночного соединения (эскизная компоновка)……….34
8. Уточненный расчет валов (редуктор)……………………………………….36
9. Расчет подшипников на долговечность……………………………………..45
10. Расчет ведомого вала по переменным напряжениям……………………..49
11. Выбор муфты ………………………………………………………………..51
12. Выбор смазки, зацепления и подшипников……………………………….52
13. Сборка редуктора …………………………………………………………...53
Список использованной литературы …………………………………………..54
Введение
Редуктор называют механизмом, состоящим из зубчатых или червячных передач, выполненный в виде отдельного закрытого агрегата и служащий для передачи мощности от двигателя к рабочей машине. Кинематическая схема привода может включать помимо редуктора открытые зубчатые передачи, ременную или цепную.
Назначение привода – понижение угловой скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим.
По относительному расположению валов в пространстве редукторы бывают горизонтальные и вертикальные; по особенности кинематической схемы – развернутые, соосные, с раздвоенной ступенью и т.д.; по типу передачи – зубчатые, червячные и зубчато-червячные; по типу цилиндрических колес – цилиндрические, конические и цилиндрическо-конические.
Если оси зубьев параллельны оси вращения колес, такое зацепление называют прямозубым, если оси расположены под углом – сцепление называют косозубым.
Редуктор состоит из массивного литого корпуса, узлов зубчатых колес и шестерен, крышек подшипников и регулировочных колец.
Техническая характеристика привода
Данный привод состоит из электродвигателя, ременной передачи, двухступенчатого редуктора, муфты, цепного транспортера.
Муфта – упругая втулочно-пальцевая.
Электродвигатель – 4А112МА6УЗ.
Двухступенчатый редуктор состоит из двух цилиндрических передач.
Первая цилиндрическая передача – косозубая. Вторая цилиндрическая передача – прямозубая.
Открытая передача – плоскоременная.
Рама – литая.
1. Кинематический расчёт передаточного
механизма. Выбор электродвигателя.
Определяем требуемую мощность электродвигателя:
 , (1.1)
, (1.1)
где ![]() - требуемая мощность,
кВт,
- требуемая мощность,
кВт,
![]() - мощность на
выходном валу, кВт, (заданна по условию расчета).
- мощность на
выходном валу, кВт, (заданна по условию расчета).
![]() - общий КПД механизма.
- общий КПД механизма.
Для последовательного соединения передач:
![]() , (1.2)
, (1.2)
где, ![]() ,
, ![]() ,
, ![]() - частные КПД
отдельных передач;
- частные КПД
отдельных передач; ![]()
![]()
![]() - КПД пары
подшипников;
- КПД пары
подшипников; ![]() таб. 2.2 [1].
таб. 2.2 [1].
![]() -
количество пар подшипников.
-
количество пар подшипников. ![]() (по заданию).
(по заданию).
![]()
 кВт
кВт
![]() Принимаем по таблице
П3 [3] тип двигателя 4А112МА6УЗ с Рном = 3 кВт, nэл = 980 об/мин. где; 4 – порядковый
номер серии,
Принимаем по таблице
П3 [3] тип двигателя 4А112МА6УЗ с Рном = 3 кВт, nэл = 980 об/мин. где; 4 – порядковый
номер серии,
А – вид двигателя: асинхронный.
112 – высота оси вращения ротора;
М – установочный размер по длине станины,
А –
6 – число полюсов.
УЗ – климатическая зона эксплуатации.
Таблица № 1.1 Размеры электродвигателя 4А112МА6
|
Типоразмер 4А |
Число полюсов |
d1 |
l1 |
l30 |
b1 |
h1 |
d30 |
l10 |
l31 |
d10 |
b10 |
h |
h10 |
h31 |
|
112М |
6 |
32 |
80 |
435 |
10 |
8 |
246 |
140 |
70 |
12 |
190 |
112 |
12 |
285 |
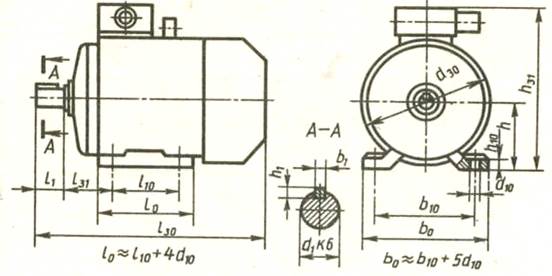
Рисунок 1.1 Электродвигатель 4А112МА6УЗ.
Определяем общее передаточное число механизма:
![]() ,
,![]() ,
, ![]() - передаточные числа
отдельных передач, входящих в механизм.
- передаточные числа
отдельных передач, входящих в механизм.
 (1.3)
(1.3)
Принимаем: ![]() ,
, ![]() (косозубая),
(косозубая), ![]() (прямозубая) (таб. 2.3
[1]).
(прямозубая) (таб. 2.3
[1]).
Определение силовых и кинематических параметров привода:
Мощность:
![]() (1.4)
(1.4)
![]() кВт
кВт
![]() (1.5)
(1.5)
![]() кВт
кВт
![]() (1.6)
(1.6)
![]() кВт
кВт
Частота вращения:
![]() об/мин
об/мин
 (1.7)
(1.7)
 об/мин
об/мин
 (1.8)
(1.8)
 об/мин
об/мин
 (1.9)
(1.9)
 об/мин
об/мин
Определяем максимальное допускаемое отклонение частоты вращения приводного вала рабочей машины, об/мин.
 (1.10)
(1.10)
Δn < 3% - условие выполняется.
Угловая скорость:
 (1.11)
(1.11)
 с-1
с-1
 (1.12)
(1.12)
 с-1
с-1
 (1.13)
(1.13)
 с-1
с-1![]()
 (1.14)
(1.14)
 с-1
с-1
Вращающий момент:
 (1.15)
(1.15)
 Нм
Нм
 (1.16)
(1.16)
 Нм
Нм
 (1.17)
(1.17)
 Нм
Нм
 (1.18)
(1.18)
 Нм
Нм
Таблица 1.2 – Силовые и кинематические параметры привода
|
Тип двигателя 4А112МА6 Рном = 3 кВт; nном = 980 об/мин |
||||||||
|
Параметр |
Передача |
Параметр |
Вал |
|||||
|
Открытая |
Закрытая 1 |
Закрытая 2 |
Двигателя |
Редуктора |
||||
|
Быстроходный |
Тихоходный |
Тихоходный |
||||||
|
Передато- чное число u |
2 |
3,5 |
4 |
Расчетная мощ ность Р, кВт. |
2,5 |
2,63 |
2,56 |
2,5 |
|
Угловая скорость ω, с-1 |
102,6 |
51,3 |
14,5 |
3,6 |
||||
|
КПД η |
0,96 |
0,98 |
0,98 |
Частота вращения n, об/мин |
980 |
490 |
140 |
35 |
|
Вращающий момент Т, Н·м |
24,37 |
51,3 |
177 |
694,4 |
||||
2. Расчет открытой плоскоременной передачи
Цель расчета: Посчитать основные геометрические параметры открытой передачи, определяем силы возникающие при работе открытой передачи.
Проектный расчет:
![]() (2.1)
(2.1)
![]()
По найденному значению подбираем диаметр шкива из
стандартного ряда по ГОСТ 17383-73: ![]() мм
мм
Диаметр ведомого шкива вычисляем с учетом относительного скольжения ремня:
![]() (2.2)
(2.2)
где, ε = 0.01-0.02 – коэффициент скольжения.
![]()
Полученное значение округляем до ближайшего из стандартного
ряда по ГОСТ 17383-73: ![]() .
.
Вычисляем фактическое передаточное число ![]() и его отклонение Δu от заданного u:
и его отклонение Δu от заданного u:
 (2.3)
(2.3)
 (2.4)
(2.4)

Вычисляем ориентировочное межосевое расстояние:
![]() (2.5)
(2.5)
![]() мм
мм
Определяем длину ремня (без учета припуска на соединение концов):
 (2.6)
(2.6)
 мм
мм
Полученное значение l округляем до стандартного: l = 2240 мм.
Уточняем межосевое расстояние:
 (2.7)
(2.7)
 мм
мм
Вычисляем угол обхвата ремнем ведущего шкива:
 (2.8)
(2.8)

150° ≥ 168° ≥ 180°
Рассчитываем скорость ремня:
 (2.9)
(2.9)
d1 – диаметр ведущего шкива, мм;
nэл – частота вращения ведущего шкива, об/мин;
 м/с
м/с
![]()
![]() м/с.
м/с.
Определяем частоту пробегов ремня:
 (2.10)
(2.10)
 с-1
с-1
![]() с-1.
с-1.
Определяем передаваемую ремнем окружную силу:
 (2.11)
(2.11)
 Н
Н
Рассчитываем допускаемую удельную окружную силу на единицу площади поперечного сечения ремня:
![]() (2.12)
(2.12)
где ![]() допускаемая приведенная удельная окружная сила
на единицу площади поперечного сечения. Принимаем
допускаемая приведенная удельная окружная сила
на единицу площади поперечного сечения. Принимаем ![]() Н/мм2 таб. 18 [1].
Н/мм2 таб. 18 [1].
![]() - коэффициент угла наклона линии центров шкивов к
горизонту. Принимаем
- коэффициент угла наклона линии центров шкивов к
горизонту. Принимаем ![]() = 1 таб. 18 [1].
= 1 таб. 18 [1].
![]() - коэффициент угла обхвата на меньшем шкиве. Принимаем
- коэффициент угла обхвата на меньшем шкиве. Принимаем
![]() = 0,97 таб. 18 [1].
= 0,97 таб. 18 [1].
![]() - коэффициент влияния натяжения от центробежной силы.
Принимаем
- коэффициент влияния натяжения от центробежной силы.
Принимаем ![]() =
1,03 таб. 18 [1].
=
1,03 таб. 18 [1].
![]() - коэффициент динамичности нагрузки и длительности
работы. Принимаем
- коэффициент динамичности нагрузки и длительности
работы. Принимаем ![]() = 1 таб. 18 [1].
= 1 таб. 18 [1].
![]() - коэффициент влияния диаметра меньшего шкива.
Принимаем
- коэффициент влияния диаметра меньшего шкива.
Принимаем ![]() =1,2
таб. 18 [1].
=1,2
таб. 18 [1].
![]() - коэффициент неровности распределения нагрузки между
кордшнурами
- коэффициент неровности распределения нагрузки между
кордшнурами
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.