Министерство образования
Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
КУРСОВОЙ ПРОЕКТ
|
По дисциплине __________________________________________________________
________________________________________________________________________
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
|
|
_____________________________________________________________________________
Автор: студент гр. ММ-00 ____________________ / /
(подпись) (Ф.И.О.)
ОЦЕНКА: _____________
Дата: ___________________
Руководитель проекта ст.преп. ______________________ / /
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2002
Аннотация
В курсовом проектировании выполнено динамическое исследование движения механизма перемещения долбяка с определением закона движения начального звена, получен график угловой скорости начального кривошипа в установившемся режиме работы.
Проведен силовой анализ механизма в одном положении в такте рабочего хода, при этом рассчитаны реакции во всех кинематических парах механизма и уравновешивающий момент на начальном звене, показывающий необходимый движущий момент для преодоления заданных сил сопротивлений движению.
Страниц 18, рисунков 1, таблиц 6 ,приложений 3.
The summary
In course designing the dynamic research of movement of the mechanism of moving of a cutter of the machine with definition of the law of movement of an initial link is executed, the diagram of angular speed initial in the established mode of operations is received.
The power analysis of the mechanism in one rule in a step of a working course is carried out, thus the reactions in all pairs of mechanism and equilibrating the moment on an initial part showing necessary driving moment for overcoming the given forces of resistance to movement are designed.
Pages 18, figures 1, tables 6, appendices 3.
Содержание
Аннотация. 2
The summary. 2
Содержание. 3
Исходные данные и задачи проектирования. 4
2. Динамическое исследование движения системы.. 6
1. Кинетостатический анализ механизма. 14
Вывод. 17
Библиографический список. 18
Исходные данные и задачи проектирования
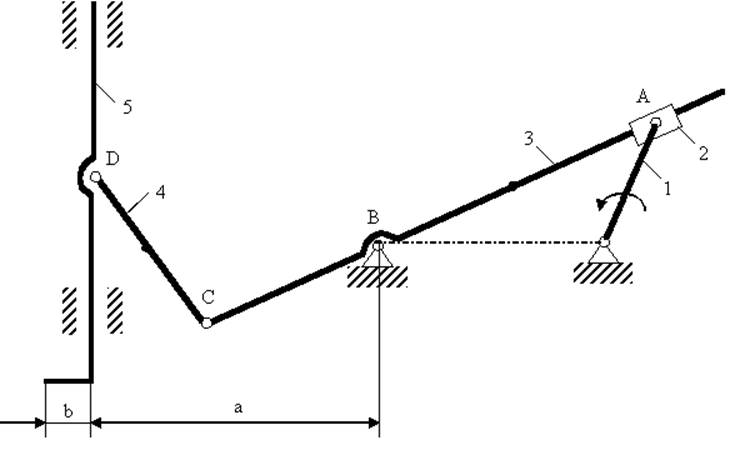
Для проведения исследований в курсовом проектировании дана схема плоского рычажного механизма перемещения долбяка с линейными размерами звеньев, рис. 1.
Исходные данные представлены в таблице 1.
|
![]()
Таблица 1. Общие исходные данные.
|
О1А, м |
О1B , м |
ВC , м |
СD, м |
a, м |
b, м |
|
m3,кг |
m4,кг |
m5,кг |
Js3,кгм2 |
Js4,кгм2 |
JO1,кг×м2 |
Jдв,кг×м2 |
|
δ |
|
|
0,08 |
0,15 |
0,1 |
0,1 |
0 |
0,02 |
20 |
200 |
28 |
290 |
4.5 |
0.1 |
1,9 |
1,12 |
120 |
0,04 |
4200 |
Заданы массы mi и моменты инерции JSi звеньев, сила FПС полезного сопротивления движению на выходном звене по тактам холостого и рабочего хода механизма, коэффициент неравномерности движения δ. Задан в цикле движения механизма постоянным движущий момент, величина его подлежит расчету.
Кинематика механизма исследована при постоянной угловой скорости начального звена ранее в расчетно-графической работе по теории механизмов и машин. Планы скоростей в 12-ти возможных положениях механизма построены решением векторных уравнений скоростей звеньев при последовательном рассмотрении структурных групп механизма. В курсовом проектировании используем первые передаточные функции механизма в виде отношений отрезков планов скоростей соответствующих звеньев и точек.
По заданной схеме и исходным данным надлежит выполнить динамическое исследование движения механизма перемещения долбяка за один полный цикл работы. В результате следует установить закон скорости начального звена, вычислить коэффициент неравномерности движения и определить потребность в маховике.
Выполнить синтез маховика как регулятора равномерности хода механизма по заданным условиям работы. Определить необходимый момент инерции маховика и размеры поперечного сечения его обода с проверкой на критическую скорость.
В одном положении механизма в такте рабочего хода определить скорость и ускорение начального звена с учетом момента инерции маховика, построить планы скоростей и ускорений и выполнить кинетостатический анализ механизма с расчетом реакций во всех кинематических парах и уравновешивающего момента. Уравновешивающий момент вычислить также способом проф. Н. Е. Жуковского.
Последовательность выполнения проекта определена методическими указаниями [1, 2].
2. Динамическое исследование движения системы
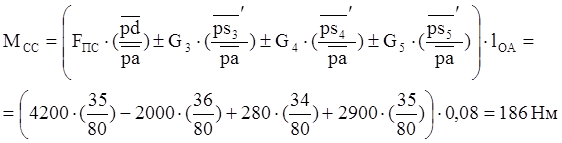
Приведенный к начальному звену - кривошипу ОА - момент сил сопротивлений с отношениями скоростей в виде отрезков планов выражаем формулой [1]:
 (1)
(1)
где ![]() - приведенный
момент сопротивления, Н×м;
- приведенный
момент сопротивления, Н×м; ![]() - сила
сопротивления, Н; i – номер звена;
- сила
сопротивления, Н; i – номер звена; ![]() - сила тяжести
масс звена, Н; p –полюс плана скоростей;
- сила тяжести
масс звена, Н; p –полюс плана скоростей; ![]() ,
, ![]() - изображения на
планах скоростей механизма проекций скоростей точек приложения сил на линии
действия соответствующих сил, мм;
- изображения на
планах скоростей механизма проекций скоростей точек приложения сил на линии
действия соответствующих сил, мм; ![]() =
70 мм - изображение скорости кривошипной точки A, мм;
=
70 мм - изображение скорости кривошипной точки A, мм; ![]() - радиус
кривошипа, м.
- радиус
кривошипа, м.
В составляющих момента от сил
тяжести масс звеньев знак «плюс» соответствует направлению вектора ![]() вверх, знак
«минус» – направлению вектора вниз.
вверх, знак
«минус» – направлению вектора вниз.
Для заданного варианта курсового проектирования перепишем формулу [1] в виде:
 . (2)
. (2)
Формулы приведенного момента сил сопротивлений для механизма заданной схемы приводим по тактам холостого и рабочего хода с заданной силой сопротивления FПС. В качестве примера для одного положения в такте рабочего хода выполняем численный расчет приведенного момента сил сопротивлений. Изображения скоростей на планах в миллиметрах чертежа получены в кинематическом исследовании механизма (см. приложение, ТММ – РГР- 1).
Приведём пример расчёта для такта рабочего хода (расчёт в положении 7):
Результаты дальнейших
расчетов приведенного момента сопротивлений по формулам (1) и (2) за цикл
движения механизма представлены в таблице 2 c
составляющими от сил сопротивления ![]() и
от весов звеньев
и
от весов звеньев ![]() ,
,![]() и
и ![]() со знаками.
со знаками.
Таблица 2. Результаты расчёта приведённого момента сопротивлений.
|
Положение |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
|
375 |
375 |
375 |
375 |
375 |
375 |
1500 |
1500 |
1500 |
1500 |
1500 |
1500 |
375 |
|
|
400 |
||||||||||||
|
|
300 |
||||||||||||
|
|
500 |
||||||||||||
|
|
0 |
14 |
26 |
24 |
14 |
0 |
11 |
14 |
18 |
14 |
16 |
9 |
0 |
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
0 |
-14 |
-26 |
24 |
14 |
0 |
11 |
14 |
18 |
-14 |
-16 |
-9 |
0 |
|
|
0 |
-14 |
-26 |
24 |
14 |
0 |
11 |
14 |
18 |
-14 |
-16 |
-9 |
0 |
|
|
0 |
-5,7 |
-10,6 |
27 |
15,7 |
0 |
24,3 |
30,8 |
39,7 |
9,4 |
10,7 |
6,04 |
0 |
Строим график ![]() на чертеже (см.
лист ТММ-КП-3) с необходимой крупностью изображений в масштабах моментов сил
на чертеже (см.
лист ТММ-КП-3) с необходимой крупностью изображений в масштабах моментов сил ![]() и углов
и углов ![]() .
.
 ,
,  , где
, где ![]() - максимальный
момент, Н×м;
- максимальный
момент, Н×м;
![]() – его изображение
на графике, мм;
– его изображение
на графике, мм; ![]() –
изображение одного оборота кривошипа на графике моментов сил.
–
изображение одного оборота кривошипа на графике моментов сил.
Интегрированием [1] приведенного момента сил по углу положения начального звена строим график работ приведенных сил сопротивлений в масштабе:
![]() , где
, где ![]() ив Дж/мм, h
– полюсное расстояние при интегрировании
ив Дж/мм, h
– полюсное расстояние при интегрировании
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.