










Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
РАСЧЕТНО-ГРАФИЧЕСКОЕ ЗАДАНИЕ № 1
|
По дисциплине __________________________________________________________
________________________________________________________________________
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
|
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
|
|||
|
|||
Автор: студент гр. _______ ____________________ /_______________/
(подпись) (Ф.И.О.)
Вариант № 12
ОЦЕНКА: ______________
ДАТА: ___________________
ПРОВЕРИЛ
|
|
||||
Руководитель проекта _________ ________________ /________________/
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2006
Расчетно-графическое задание подразделяется на 2 части:
I. Свободные колебания;
II. Затухающие колебания.
Часть I
Свободные колебания
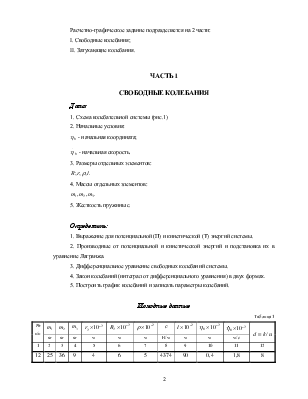
Дано:
1. Схема колебательной системы (рис.1)
2. Начальные условия:
![]() - начальная
координата;
- начальная
координата;
![]() - начальная
скорость.
- начальная
скорость.
3. Размеры отдельных элементов:
![]()
4. Массы отдельных элементов:
![]()
5. Жесткость пружины с.
Определить:
1. Выражение для потенциальной (П) и кинетической (Т) энергий системы.
2. Производные от потенциальной и кинетической энергий и подстановка их в уравнение Лагранжа.
3. Дифференциальное уравнение свободных колебаний системы.
4. Закон колебаний (интеграл от дифференциального уравнения) в двух формах.
5. Построить график колебаний и записать параметры колебаний.
Исходные данные
Таблица 1
|
№ п/п |
|
|
|
|
|
|
|
|
|
|
|
|
кг |
кг |
кг |
м |
м |
м |
Н/м |
м |
м |
м/с |
||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
12 |
25 |
36 |
9 |
4 |
6 |
5 |
4374 |
90 |
0,4 |
1,8 |
8 |
Схема колебательной системы
|
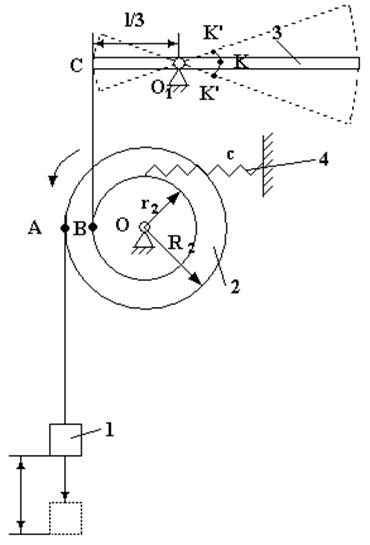
Рис.1
1 – груз массы ![]() ,
прикрепленный в точке А к свисающей с блока нити;
,
прикрепленный в точке А к свисающей с блока нити;
2 – бицилиндр массы ![]() с радиусами
с радиусами
![]() ,
, ![]() и радиусом
инерции
и радиусом
инерции ![]() относительно
его геометрической оси;
относительно
его геометрической оси;
3 – тонкий однородный стержень (планка) массы ![]() и длины
и длины ![]() ;
;
4 – пружина жесткостью с.
Решение
Система имеет одну степень свободы. За обобщенную
координату примем вертикальное отклонение ![]() груза 1 от
положения статического равновесия вниз. Все задаваемые силы, приложенные к
системе, имеют потенциал, поэтому уравнение Лагранжа можно записать в форме:
груза 1 от
положения статического равновесия вниз. Все задаваемые силы, приложенные к
системе, имеют потенциал, поэтому уравнение Лагранжа можно записать в форме:
 ,
где
,
где
t – время;
![]() -
соответственно обобщенные координата и скорость.
-
соответственно обобщенные координата и скорость.
Определение кинетической энергии системы
Кинетическая энергия всей рассматриваемой системы
![]() (1)
(1)
Груз 1 движется поступательно, поэтому его кинетическая энергия равна
 - энергия
возвратно-поступательного движения груза 1.
- энергия
возвратно-поступательного движения груза 1.
Бицилиндрический блок 2
вращается вокруг неподвижной оси ![]() с
угловой скоростью
с
угловой скоростью  .
Радиус инерции блока известен, поэтому
.
Радиус инерции блока известен, поэтому ![]() . Поэтому
кинетическая энергия блока равна
. Поэтому
кинетическая энергия блока равна
 - энергия
вращения вокруг неподвижной оси, где
- энергия
вращения вокруг неподвижной оси, где
![]() - момент
инерции бицилиндра относительно оси
- момент
инерции бицилиндра относительно оси ![]() ;
;
![]() - угловая
скорость вращения бицилиндра.
- угловая
скорость вращения бицилиндра.
Стержень 3 вращается вокруг
неподвижной оси ![]() .
Значит
.
Значит
 - кинетическая
энергия вращения планки вокруг оси
- кинетическая
энергия вращения планки вокруг оси ![]() .
.
Момент инерции стержня относительно
оси, не проходящей через его конец  .
.
Для нахождения угловой
скорости стержня ![]() рассмотрим
точки В и С, которые движутся практически с одинаковыми скоростями (вследствие
малости рассматриваемых колебаний). Тогда
рассмотрим
точки В и С, которые движутся практически с одинаковыми скоростями (вследствие
малости рассматриваемых колебаний). Тогда  . Отсюда искомая
угловая скорость
. Отсюда искомая
угловая скорость  .
.
Поэтому кинетическая энергия вращения стержня равна
 .
.
В соответствии с формулой (1) кинетическая энергия всей рассматриваемой системы

Введем обозначение
обобщенного инерционного коэффициента (обобщенной массы системы) ![]() .
.
Заметим, что  .
.
После преобразований формула кинетической энергии системы примет следующий вид
 .
.
Вычислим обобщенную массу системы
 .
.
В результате получим для
кинетической энергии всей системы  .
.
Определение потенциальной энергии системы
Потенциальная энергия
системы определяется работой сил тяжести системы и силы упругости пружины на
перемещении системы из отклоненного положения, когда груз 1 имеет координату ![]() , в
положение статического равновесия. При таком отклонении вес блока работы не
производят, поэтому потенциальная энергия всей системы равна
, в
положение статического равновесия. При таком отклонении вес блока работы не
производят, поэтому потенциальная энергия всей системы равна
![]() , (2)
, (2)
где ![]() -
потенциальная энергия пружины.
-
потенциальная энергия пружины.
Очевидно, потенциальная
энергия груза 1 равна ![]() (примем
g = 10 м/с2). Знак минус ставится потому, что
груз 1 из положения статического равновесия отклоняется вниз при положительном
(примем
g = 10 м/с2). Знак минус ставится потому, что
груз 1 из положения статического равновесия отклоняется вниз при положительном ![]() .
.
Аналогично (рис.2)
потенциальная энергия стержня равна ![]() ,
где h – смещение центра тяжести планки вверх.
,
где h – смещение центра тяжести планки вверх.
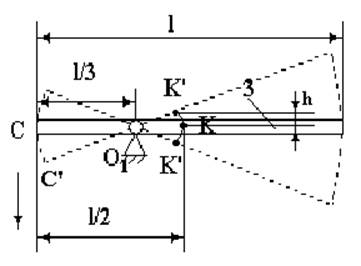
Рис.2
Легко
видеть, что  . Ввиду
того, что мы рассматриваем малые колебания системы, угол
. Ввиду
того, что мы рассматриваем малые колебания системы, угол ![]() весьма мал
и, следовательно, синус в последнем выражении можно заменить соответствующим
углом. Тем самым в разложении синуса в ряд сохраняется лишь один член. В теории
малых колебаний большая точность не нужна, ибо потенциальную энергию необходимо
вычислять с точностью до величин второго порядка малости относительно
обобщенной координаты. Таким образом,
весьма мал
и, следовательно, синус в последнем выражении можно заменить соответствующим
углом. Тем самым в разложении синуса в ряд сохраняется лишь один член. В теории
малых колебаний большая точность не нужна, ибо потенциальную энергию необходимо
вычислять с точностью до величин второго порядка малости относительно
обобщенной координаты. Таким образом,  . Для
нахождения центрального угла дуги KK’
. Для
нахождения центрального угла дуги KK’ ![]() рассмотрим
перемещение планки в точку С’.
рассмотрим
перемещение планки в точку С’.
Следовательно, потенциальная энергия стержня равна
 .
.
Потенциальная
энергия пружины равна  ,
где
,
где
![]() -
динамическая деформация пружины;
-
динамическая деформация пружины;
![]() -
статическая деформация пружины.
-
статическая деформация пружины.
 , где
, где
![]() -
растяжение пружины при движении груза 1 вниз.
-
растяжение пружины при движении груза 1 вниз.
 .
.
После подстановки и преобразования получим
 .
.
В соответствии с формулой (2) потенциальная энергия всей системы равна

 .
.
В положении, соответствующем
![]() , система
находится в равновесии. Поэтому должно выполняться условие:
, система
находится в равновесии. Поэтому должно выполняться условие:  . Тогда
. Тогда
 .
.
Преобразуем выражение для полной потенциальной энергии

Обозначим выражение  , где
, где
μ – обобщенная жесткость системы, Н/м.
 .
.
Таким образом, потенциальная энергия всей системы равна
 .
.
Полные кинетическая и потенциальная энергии системы


Уравнение Лагранжа
Дифференциальное уравнение свободных колебаний системы
![]()
Разделим дифференциальное уравнение колебаний на m
 , где
, где
k – круговая частота колебаний, рад/с.

![]()
Закон колебаний
(интеграл от дифференциального уравнения) в двух формах
I форма закона колебаний:
![]() , где с1,2 – постоянные
интегрирования.
, где с1,2 – постоянные
интегрирования.

![]() .
.
II форма закона колебаний:
![]() , где
, где
a – неизвестная амплитуда колебаний.
![]()
![]()
α – неизвестная начальная фаза колебаний.

![]()
Начальная фаза, выраженная
через время t,  .
.
Период колебаний  .
.
Абсолютная частота колебаний  .
.
Размах колебаний ![]() .
.
Параметры свободных колебаний
1. Начальная координата ![]()
2. Начальная скорость ![]()
3. Начальная фаза ![]()
4. Фаза колебаний ![]()
5. Амплитуда колебаний ![]()
6. Размах колебаний ![]()
7. Период колебаний ![]()
8. Частоты колебаний:
8.1. Круговая частота ![]()
8.2. Абсолютная частота ![]()
|
![]()
![]()
![]()
|
|
Часть II
затухающие колебания
Исследование затухающих колебаний проведем на той же схеме
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.