




Министерство общего образования
Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
РАСЧЕТНО-ГРАФИЧЕСКОЕ ЗАДАНИЕ
|
По дисциплине _____ _________________________________________
________________________________________________________________________
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
|
________________________________________________________________________
________________________________________________________________________ ________________________________________________________________________
Автор: студент гр. ГМ-01-1 ___________________ / /
(подпись) (Ф.И.О.)
ОЦЕНКА: _____________
Дата: ___________________
ПРОВЕРИЛ
Руководитель проекта ________________ / В. /
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2003 год
Задание
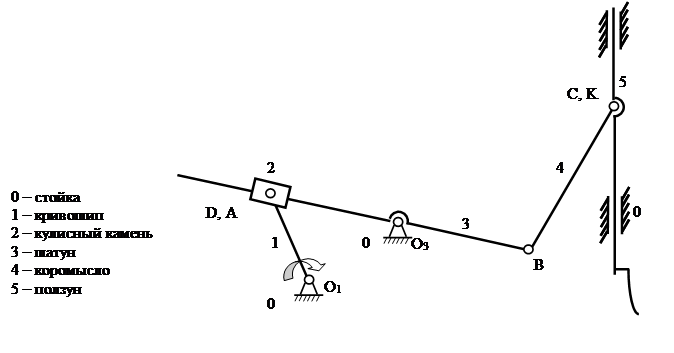
1. Выполнить структурный анализ механизма. Составить структурную формулу механизма. Определить класс механизма.
2. Построить планы положений механизма (12 положений).
3. Построить планы положений скоростей механизма для всех 12 положений механизма. Вычислить все мгновенные скорости всех подвижных точек механизма определить величину и направление мгновенных угловых скоростей звеньев механизма участвующих в плоскопараллельном и во вращательном движении.
4. Для двух выделенных ранее положений механизма построить ускорение. Вычислить линейные ускорения всех характерных подвижных точек механизма. Определить величину и направление мгновенных угловых ускорений звеньев механизма участвующих во вращательном или плоскопараллельном движении.
5. Методом графического интегрирования и дифференцирования построить кинематические диаграммы следующих зависимостей:
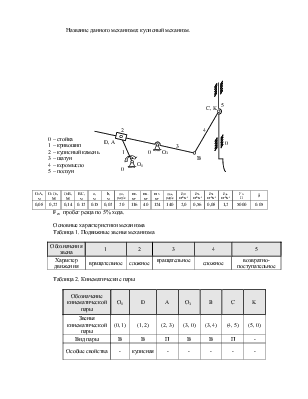
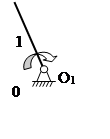
Название данного механизма: кулисный механизм.
|
|||
 |
|||
|
O1A, м |
O1О3, М |
О3B, М |
BC, м |
a, м |
b, м |
ω1, рад/c |
m3, кг |
m4, кг |
m5, кг |
ωдв, рад/с |
JО1 кг*м2 |
JS3 кг*м2 |
JS4 кг*м2 |
Jдв кг*м2 |
Fn, H |
δ |
|
0,08 |
0,22 |
0,14 |
0.12 |
0.15 |
0,02 |
20 |
116 |
40 |
124 |
140 |
2,0 |
0,56 |
0,08 |
1,2 |
5000 |
0.05 |
Fcx пробег резца по 5% хода.
Основные характеристики механизма
Таблица 1. Подвижные звенья механизма
|
Обозначения звена |
1 |
2 |
3 |
4 |
5 |
|
Характер движения |
вращательное |
сложное |
вращательное |
сложное |
возвратно-поступательное |
Таблица 2. Кинематические пары
|
Обозначение кинематической пары |
О1 |
D |
A |
О3 |
B |
С |
K |
|
Звенья кинематической пары |
(0, 1) |
(1, 2) |
(2, 3) |
(3, 0) |
(3, 4) |
(4, 5) |
(5, 0) |
|
Вид пары |
В |
В |
П |
В |
В |
П |
- |
|
Особые свойства |
- |
кулисная |
- |
- |
- |
- |
- |
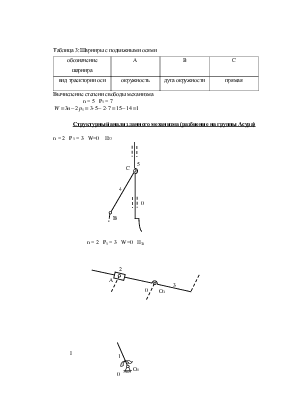
Таблица 3:Шарниры с подвижными осями
|
обозначение шарнира |
A |
B |
C |
|
вид траектории оси |
окружность |
дуга окружности |
прямая |
Вычисление степени свободы механизма
n = 5 P5 = 7
![]()
Структурный анализ данного механизма (разбиение на группы Асура)
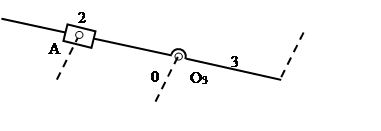
n = 2 P5 = 3 W=0 II22
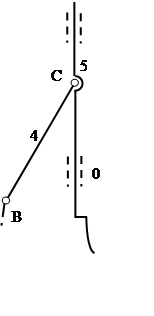 |
n = 2 P5 = 3 W=0 II33
 |
|||
 |
|||
I
Данный механизм образован путем присоединения к механизму I класса структурной группы II22 и затем еще одной структурной группы II33. I- II22 - II33
Крайние положения механизма характеризуют границы рабочего и холостого хода. Крайние положения механизм будет занимать, когда кривошип О1А будет перпендикулярен шатуну О3В. Первое крайнее положение, когда кулиса находиться вверху, характеризует начало рабочего – конец холостого хода, второе положение – конец рабочего – начало холостого хода.
Начиная со второго крайнего положения, траектория кривошипа О1А (окружность) разбивается на двенадцать равных частей и строится двенадцать положений механизма.
Определение масштаба:
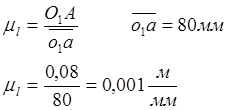
По
формуле ![]() вычислим скорость точки А.
вычислим скорость точки А.
![]()
![]()
Определение масштаба:
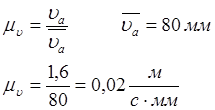
Для построения планов скоростей составим векторные уравнения.
Затем
решим их графически. Для построения скорости точки B
воспользуемся отношением  следовательно
следовательно
 .
.
После построений составляем таблицу значений
скоростей. Скорости, заносимые в таблицу получаются путём замера
соответствующих векторов скоростей на чертеже и умножения их на масштабный
коэффициент ![]() .
.
|
положение |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1,6 |
0,88 |
0,72 |
0,74 |
0,06 |
0,74 |
20 |
5,27 |
5,29 |
1,83 |
|
|
2 |
1,6 |
1,54 |
1,5 |
1,5 |
0 |
1,5 |
20 |
10,6 |
10,7 |
1,3 |
|
|
3 |
1,6 |
1,4 |
1,3 |
1,24 |
0,06 |
1,26 |
20 |
9,3 |
9,3 |
1,75 |
|
|
4 |
1,6 |
0,52 |
0,4 |
0,36 |
0,06 |
0,38 |
20 |
2,84 |
2,86 |
1 |
|
|
5 |
1,6 |
0,32 |
0,2 |
0,2 |
0,04 |
0,2 |
20 |
1,43 |
1,43 |
0,67 |
|
|
6 |
1,6 |
0,94 |
0,52 |
0,48 |
0,22 |
0,5 |
20 |
3,6 |
3,71 |
1,3 |
|
|
7 |
1,6 |
1,38 |
0,68 |
0,66 |
0,34 |
0,66 |
20 |
4,8 |
4,85 |
1 |
|
|
8 |
1,6 |
1,6 |
0,76 |
0,76 |
0,42 |
0,76 |
20 |
5,3 |
5,43 |
0,33 |
|
|
9 |
1,6 |
1,54 |
0,72 |
0,72 |
0,42 |
0,72 |
20 |
5,17 |
5,2 |
0,67 |
|
|
10 |
1,6 |
1,26 |
0,64 |
0,64 |
0,3 |
0,64 |
20 |
4,52 |
4,6 |
1,17 |
|
|
11 |
1,6 |
0,74 |
0,44 |
0,44 |
0,14 |
0,42 |
20 |
3 |
3,14 |
1,25 |
|
|
0,12 |
1,6 |
1,6 |
1,1 |
0,22 |
0,24 |
0,6 |
20 |
7,7 |
7,86 |
8,5 |
|
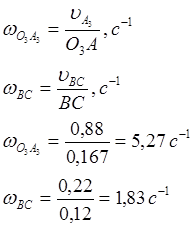
Рассчитаем угловые скорости звеньев для первого положения.
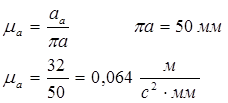
По формуле ![]() найдем ускорение кривошипа
найдем ускорение кривошипа
![]()
Определение масштаба:
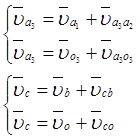
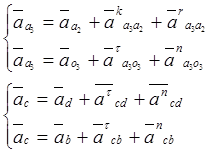
Запишем векторные уравнения:
Ускорение a3 определяем, как сумму ускорений a2 , а2a3 кориолисова и а2a3 реактивного, либо, как сумму ускорений a3, а3о3 тангенсального и а3о3 нормального .
Ускорение aс определяем, как сумму ускорений ad, acd тангенсального и acd нормального, либо, как сумму ускорений ab, acb тангенсального и acb нормального.
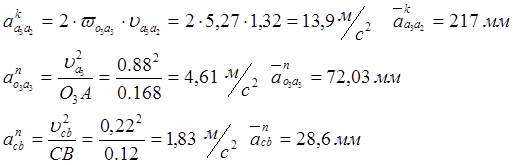
Для 1 положения:
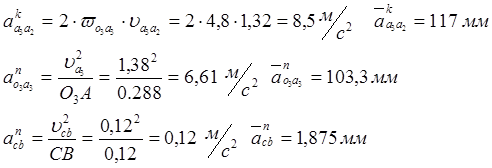
Для 7 положения:
По результатам построений составляем таблицу необходимых ускорений:
|
положение |
|
|
|
|
|
|
|
1 |
3,2 |
17,1 |
14,1 |
12,4 |
2,37 |
2,75 |
|
7 |
3,2 |
9,024 |
4,4 |
1,8 |
1,54 |
0,9 |
Рассчитаем угловые
ускорения 
|
положение |
|
|
|
1 |
4,91 |
13,3 |
|
7 |
1,04 |
0,64 |
Определение масштаба:
Построение графика ![]()
Скорости ![]() с 1 по 5 примем положительными
(холостой ход), а скорости
с 1 по 5 примем положительными
(холостой ход), а скорости ![]() с 5 по 11
отрицательными (рабочий ход).
с 5 по 11
отрицательными (рабочий ход).
Определение масштаба:
h1=60 мм
Построение графика ![]()
Определение масштаба:
![]()

Построение графика ![]()
Определение масштаба:
По графикам в 3
положении  , а по плану ускорений
, а по плану ускорений  . Соответственно для седьмого
положения
. Соответственно для седьмого
положения  ,
, .
.
Можно сделать вывод, что значения для ускорений, полученные методом
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.