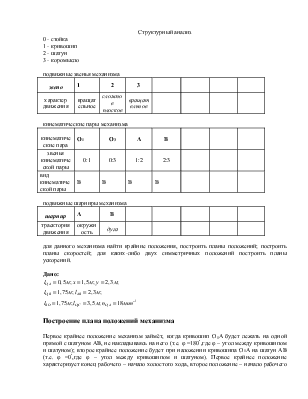
Структурный анализ
0 - стойка
1 - кривошип
2 - шатун
3 - коромысло подвижные звенья механизма
|
звено |
1 |
2 |
3 |
||||
|
характер движения |
вращательное |
сложное плоское |
вращательное |
кинематические пары механизма
|
кинематические пара |
О1 |
О3 |
А |
В |
|||
|
звенья кинематической пары |
0:1 |
0:3 |
1:2 |
2:3 |
|||
|
вид кинематической пары |
В |
В |
В |
В |
подвижные шарниры механизма
|
шарнир |
А |
В |
|||||
|
траектория движения |
окружность |
дуга |
для данного механизма найти крайние положения, построить планы положений; построить планы скоростей; для каких-либо двух симметричных положений построить планы ускорений.
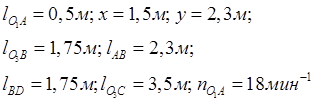
Дано:
Построение плана положений механизма
Первое крайнее положение механизм займёт, когда кривошип О1А будет лежать на одной прямой с шатуном АВ, не накладываясь на него (т.е. φ =180˚,где φ – угол между кривошипом и шатуном); второе крайнее положение будет при наложении кривошипа О1А на шатун АВ (т.е. φ =0˚,где φ – угол между кривошипом и шатуном). Первое крайнее положение характеризует конец рабочего – начало холостого хода, второе положение – начало рабочего – конец холостого хода.
Начиная с первого крайнего положения, траектория кривошипа О1А (окружность) разбивается на 12 равных частей и строится 6 положений механизма, “плюс” положение механизма во втором крайнем положении.
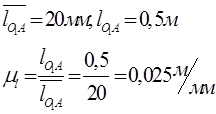
На чертеже отмечаем
точки О1 и О3; строим траекторию т.А (R = ![]() с центром в т.О1);
строим траекторию т.В (R =
с центром в т.О1);
строим траекторию т.В (R = ![]() с
центром в т.О3); строим крайнее положение т.А0 (R =
с
центром в т.О3); строим крайнее положение т.А0 (R = ![]() из точки О1 делаем
засечку на траектории т.В, получим В0 , соединив В0 с О1
на пересечении траектории т.А получим А0; делим окружность на 12 частей;
строим крайнее положение т.А’ (R =
из точки О1 делаем
засечку на траектории т.В, получим В0 , соединив В0 с О1
на пересечении траектории т.А получим А0; делим окружность на 12 частей;
строим крайнее положение т.А’ (R = ![]() из точки О1 делаем
засечку на траектории т.В, получим В’ , соединив В’ с О1
на пересечении траектории т.А получим А’; строим остальные положения
( R =
из точки О1 делаем
засечку на траектории т.В, получим В’ , соединив В’ с О1
на пересечении траектории т.А получим А’; строим остальные положения
( R = ![]() из точек на траектории т.А
делаем засечки на траектории т.В); так же строим и траектории точек С, D
из точек на траектории т.А
делаем засечки на траектории т.В); так же строим и траектории точек С, D
Построение плана скоростей механизма


Вектора полных скоростей точек всегда выходят из полюса, а вектора относительных скоростей звеньев замыкают их концы.
На чертеже отмечаем
точку р (полюс); строим вектор ![]() ; строим вектор
; строим вектор ![]() из векторного уравнения
из векторного уравнения ![]() ( из т.а проводим
линию действия
( из т.а проводим
линию действия ![]() , из р проводим
линию действия
, из р проводим
линию действия ![]() , на их пересечении получаем т.в);
так же строим изображение скоростей точек С, D.
, на их пересечении получаем т.в);
так же строим изображение скоростей точек С, D.
Таблица плана скоростей
|
Положение |
0’,12 |
2 |
4 |
6 |
8 |
10 |
||
|
|
0,94 |
0,94 |
0,94 |
0,94 |
0,94 |
0,94 |
||
|
|
0 |
0,96 |
0,68 |
0,04 |
0,75 |
0,88 |
||
|
|
0 |
1,92 |
1,36 |
0,08 |
1,5 |
1,76 |
||
|
|
0,94 |
0,64 |
0,56 |
0,92 |
0,39 |
0,32 |
||
|
|
0 |
1,92 |
1,36 |
0,08 |
1,5 |
1,76 |
||
Построение плана ускорений механизма
Ускорения точек и звеньев раскладываются на тангенциальные и нормальные составляющие. Точно также ускорения точек выходят из полюса, а ускорения звеньев замыкают их.

Строим планы ускорений для 4 и 10 положений; вычисляем необходимые ускорения. Для нахождения т.В надо решить графически систему векторных уравнений:
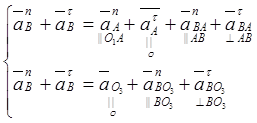
для 4 положения:
для 10 положения:
Так же строим изображение ускорений точек С, D.
Таблица плана ускорений
|
Положение |
аa(м/с2) |
аB(м/с2) |
аC(м/с2) |
аBA(м/с2) |
аD(м/с2) |
||
|
4 |
1,78 |
1.07 |
2.14 |
1.17 |
2.14 |
||
|
10 |
1.78 |
0.78 |
1.56 |
1.25 |
1.56 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.