
























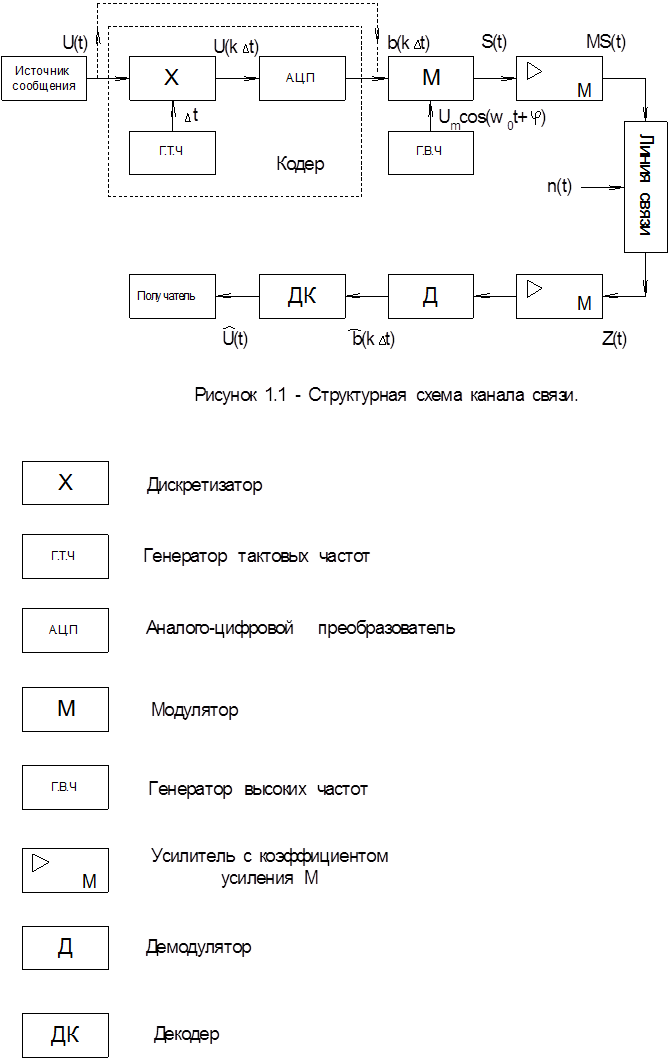
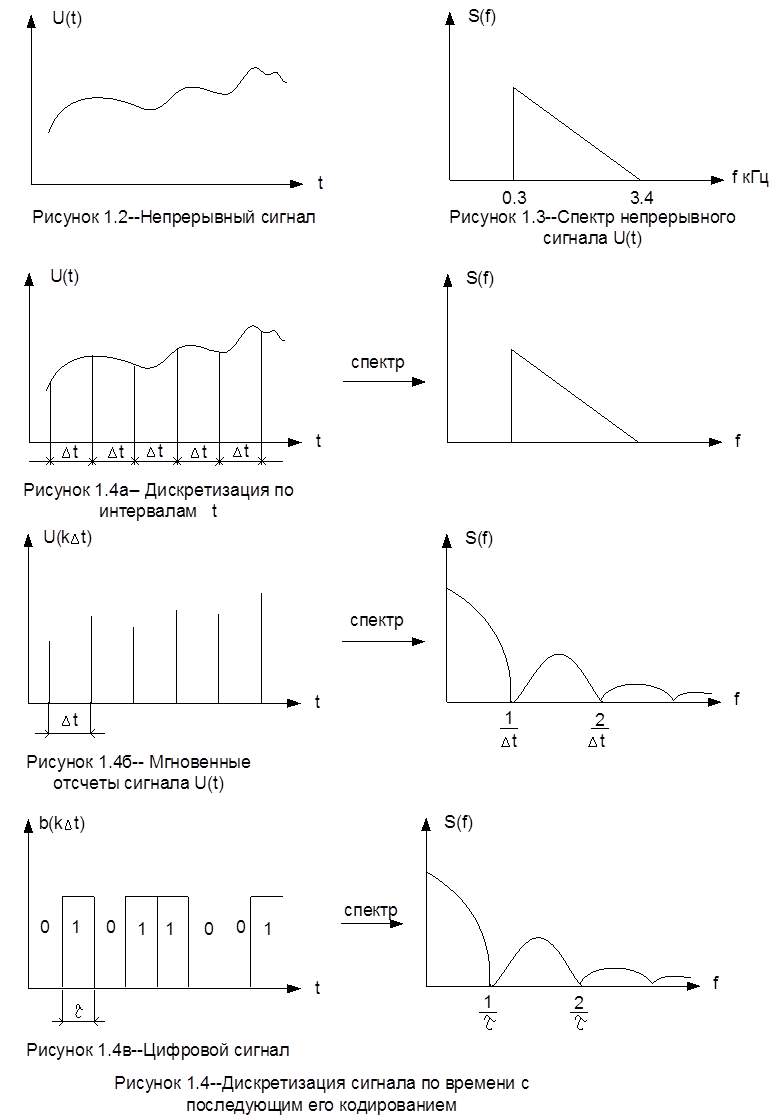
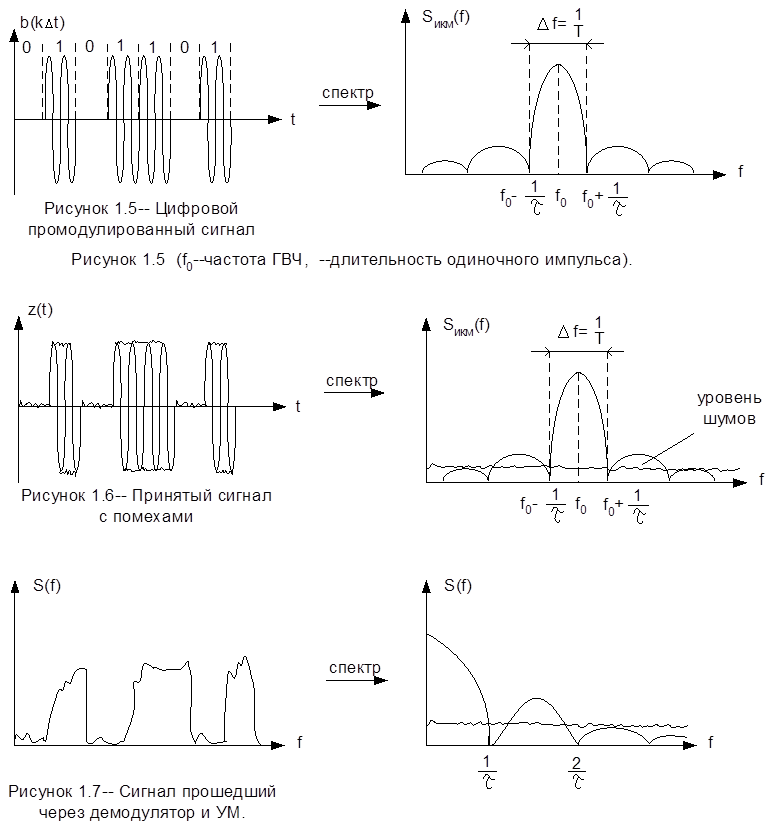
Поэтому принятый сигнал необходимо усилить для чего его подают на усилитель мощности. Естественно при усилении усиливается как полезный сигнал S(t) так и шум – n(t).Усиленный сигнал поступает на демодулятор, где происходит процесс выделения низкочастотной составляющей из высокочастотного сигнала (рисунок 1.7). Выделенный таким образом сигнал поступает на декодер, где в случае цифровой передачи из цифрового сигнала формируется аналоговый сигнал, который приблизительно повторяет исходный сигнал U(t).
2. Выбор схемы приемника.
Приемник—это устройство, которое обрабатывает приемное колебание
z(t)=S(t)+n(t) и восстанавливает по нему переданное сообщение U(t). Другими словами, приемник должен на основе анализа суммарного колебания пришедшего искаженного сигнала S(t) и помех n(t) определить, какое сообщение передавалось. Поэтому приемное устройство является одним из наиболее важных и сложных элементов в системе связи.
Каждый демодулятор математически описывается законом, по которому поступивший на его вход непрерывный сигнал превращается в кодовый символ. Этот закон называется правилом решения. Требуется определить каков должен быть демодулятор, чтобы обеспечить оптимальное (то есть наилучшее из возможных) качество приема.
Такая задача была впервые поставлена и решена (для гауссовского канала) в 1946 году ученым В. А. Котельниковым. В этой постановке качество оценивалось вероятностью появления правильного символа. Максимум этой вероятности при заданном виде модуляции В. А. Котельников назвал потенциальной помехоустойчивостью, а демодулятор обеспечивающий этот максимум—идеальным приемником. Из этого следует, что ни в одном реальном приемнике (демодуляторе) вероятность правильного приема символа не может быть больше чем в идеальном приемнике.
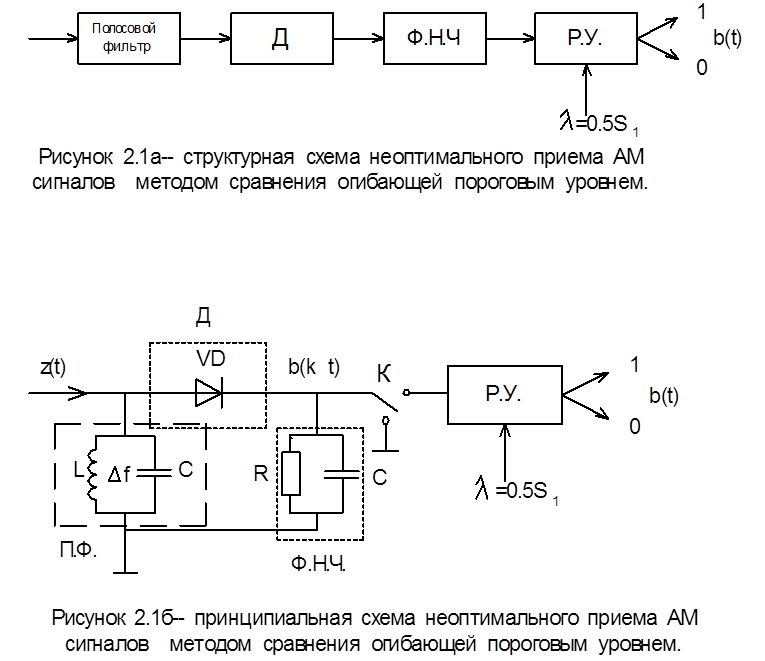
Приемное устройство для амплитудно-модулированного некогерентного
сигнала.(рисунок 2.1а и 2.1б)
Важно отметить, что практическая реализация потенциальной верности передачи требует применения когерентного детектирования сигналов в приемнике. Но и при этом вследствие некоторого расхождения частоты и фазы при ходящего и опорного сигналов, верность передачи в реальных приемниках оказывается меньше потенциальной. Еще более верность отличается от потенциальной, когда в приемниках дискретной частотной манипуляции (ДЧМ) и дискретной амплитудной манипуляции (ДАМ) применяются некогерентные детекторы, а также когда вместо дискретной фазовой манипуляции (ДФМ) используется относительная дискретная фазовая манипуляция (ОДФМ).
Амплитудный детектор (Д) и фильтр нижних частот (Ф.Н.Ч.) выделяют огибающую b(k∆t) принимаемого сигнала, прошедшего входной избирательный блок (полосовой фильтр—ПФ) с эффективной полосой пропускания ∆f , достаточной для получения всех наиболее существенных компонент сигнала. Огибающая b(k∆t) с выхода фильтра нижних частот в определенные моменты времени (например, в середине посылки) сравнивается в решающем устройстве (РУ) с некоторым пороговым уровнем λ=0.5S1 . При выполнении неравенства b(k∆t) > λ регистрируется символ “1”, в противном случае—“0”.
Важно отметить, что при такой системе связи вероятность ошибок будет высокой. Это обусловлено двумя основными факторами:
—меньшее значение соотношения сигнал шум по сравнению с другими вида ми приема.
—межсимвольными помехами, создаваемыми переходными процессами в фильтрах.
3. Расчет вероятности ошибки.
Рассчитаем вероятность ошибки приемника при амплитудно-модулированном некогерентном приеме. Должно отметить, что эта вероятность будет самая высокая по сравнению с другими видами приема.
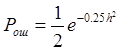
—формула для расчета вероятности ошибки при АМ НКГ, где
—соотношение сигнал шум по мощности (Рс—мощность сигнала, Рш –мощность шума, σш—средне квадратичное отклонение шума).
Дисперсия шума ( σш2) через спектральную плотность помехи (G0) и длительность элементарной посылки (Tи) рассчитывается по формуле:

Тогда соотношение сигнал шум по мощности будет равно:
Вероятность ошибки при полученном соотношении сигнал шум равна:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.