Произведем расчет
электромагнитных процессов при номинальной нагрузке и частоте в 2 раза меньше номинальной
– 25 Гц. При этом согласно закону скалярного регулярного регулирования скорости
 необходимо
уменьшить в 2 раза амплитуду сигнала управления, и, как будет видно из рисунка
16, амплитуда первой гармоники напряжения также уменьшится в 2 раза.
необходимо
уменьшить в 2 раза амплитуду сигнала управления, и, как будет видно из рисунка
16, амплитуда первой гармоники напряжения также уменьшится в 2 раза.
Из формулы для определения момента
найдем скольжение

где Мн = 790 Н/м.
Сопротивление фазы двигателя

![]() Ом,
Ом,
![]() Ом,
Ом,
 ,
,
 мГн.
мГн.
Зададим сигналы управления и опорное напряжение
![]() ,
,
![]() ,
,
![]() ,
,
 .
.
|
|
Рисунок 14 - Сигналы управления и опорное напряжение при f2 = 25 Гц
|
|
Рисунок 15 - Напряжение на нагрузке фазы А в схеме с нулевым проводом при f2 = 25 Гц
|
|
Рисунок 16 - Напряжение на нагрузке фазы А в мостовой схеме и его первая гармоника при f2 = 25 Гц
|
|
Рисунок 17 - Линейное напряжение ![]() при f2 = 25 Гц
при f2 = 25 Гц
|
|
а)
|
б)
|
|
в)
Рисунок 18 – Ток и первая гармоника напряжения при f2 = 25 Гц:
а - в фазе А; б - в фазе В; в - в фазе С
|
|
Рисунок 19 – Токи в фазах нагрузки при f2 = 25 Гц
Все расчеты были произведены для номинальной нагрузки М = Мн. При недогрузке двигателя КПД и cosφ уменьшаются. Чтобы этого не происходило, необходимо уменьшать напряжение на двигателе при уменьшении момента. Момент находят по формуле
Тогда в двигательном и
генераторном режимах номинальные моменты соответственно равны: в двигательном (s = 0,04) ![]() =
790 Н/м, в генераторном (s = -0,04)
=
790 Н/м, в генераторном (s = -0,04) ![]() =
-920 Н/м.
=
-920 Н/м.
Это уравнение связывает три переменных величины: М, U1, s. Для того, чтобы скольжение оставалось номинальным при изменении момента, напряжение на двигателе необходимо изменять по закону
График полученной зависимости представлен на рисунке 20, где β = М/Мн – коэффициент нагрузки.
Рисунок 20 – Зависимость напряжения на асинхронной машине от коэффициента нагрузки
 Рисунок 21 –
Зависимость КПД и коэффициента мощности от коэффициента нагрузки при
регулируемом и нерегулируемом напряжении в двигательном и генераторном режимах
Рисунок 21 –
Зависимость КПД и коэффициента мощности от коэффициента нагрузки при
регулируемом и нерегулируемом напряжении в двигательном и генераторном режимах
Как видно из рисунка 21, при недогрузке двигателя энергетические показатели остаются на номинальном уровне, тогда как при постоянном напряжении значительно снижаются.
Рисунок 22 - Зависимость напряжения на асинхронной машине от котангенса угла φ в двигательном и генераторном режимах
Из рисунка 22 видно,
что зависимость напряжения на двигателе при коэффициенте нагрузки ![]() практически
линейная.
практически
линейная.
Функциональная схема системы управления инвертором напряжения изображена на рисунке 23.
Рисунок 23 - Функциональная схема системы управления
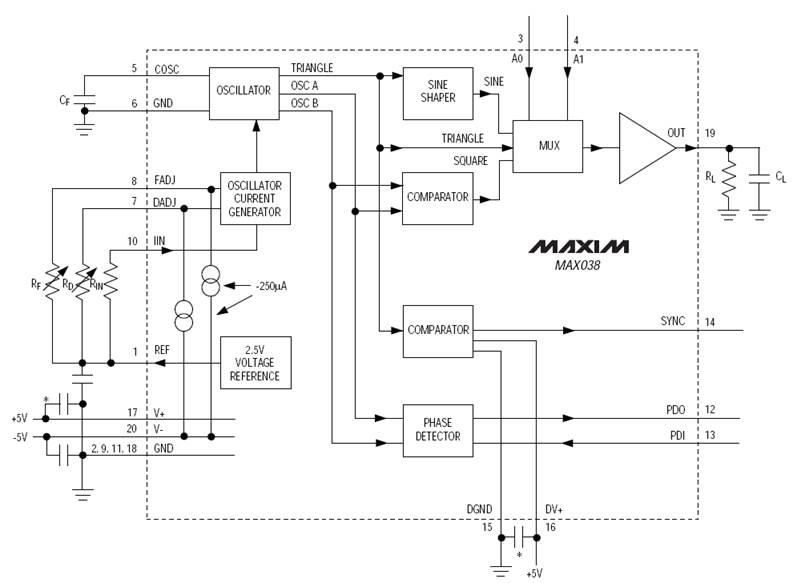
Рисунок 24 - внутренняя структура микросхемы MAX038
![]() Генераторы синусоидального напряжения выполним на основе микросхемы MAX038, внутренняя структура которой показана
на рисунке 24. Рассмотрим генератор синусоиды фазы А. Схема включения показана
на рисунке 25.
Генераторы синусоидального напряжения выполним на основе микросхемы MAX038, внутренняя структура которой показана
на рисунке 24. Рассмотрим генератор синусоиды фазы А. Схема включения показана
на рисунке 25.
Рисунок 25 - Генератор синусоиды фазы А
На вход IIN через резистор R1 подается напряжение управления частотой, причем частота равна
 .
.
Рекомендуемое значение входного тока (10 – 400) мкА. Возьмем Uf = 5В, R1 = 30 кОм рассчитаем значения IIN и C1.
 ,
,
 мкА.
мкА.
 ,
,
 мкФ.
мкФ.
![]() При минимальной частоте 5 Гц напряжение равно
При минимальной частоте 5 Гц напряжение равно
 ,
,
 В.
В.
Для генерации частоты 50 Гц следует увеличить напряжение до
 ,
,
 В.
В.
Рекомендуемые значения элементов: R2 = 12 кОм, С2 = 1 нФ, С3 = С4 = 1 мкФ.
Амплитуда выходного сигнала составляет 1В.
Для реализации скалярного управления двигателем требуется уменьшать амплитуду сигнала управления с уменьшением частоты. Для этого после генератора синусоиды установим усилительный каскад на основе операционного усилителя (рисунок 26).
Рисунок 26 – Усилитель сигнала управления
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.