
СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ
1 С помощью средств MATLAB6p5/Simulink смоделируем предложенную схему системы стабилизации скорости

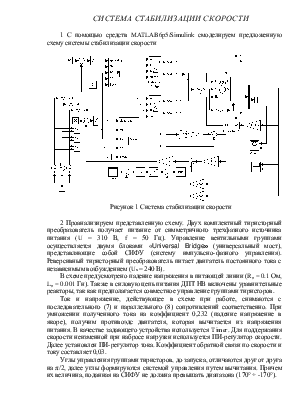
Рисунок 1 Система стабилизации скорости
2 Проанализируем представленную схему. Двух комплектный тиристорный преобразователь получает питание от симметричного трехфазного источника питания (U = 310 В, f = 50 Гц). Управление вентильными группами осуществляется двумя блоками «Universal Bridge» (универсальный мост), представляющие собой СИФУ (систему импульсно-фазного управления). Реверсивный тиристорный преобразователь питает двигатель постоянного тока с независимым возбуждением (Uв = 240 В).
В схеме предусмотрено падение напряжения в питающей линии (Rл = 0.1 Ом, Lл = 0.001 Гн). Также в силовую цепь питания ДПТ НВ включены уравнительные реакторы, так как предполагается совместное управление группами тиристоров.
Ток и напряжение, действующее в схеме при работе, снимаются с последовательного (7) и параллельного (8) сопротивлений соответственно. При умножении полученного тока на коэффициент 0,232 (падение напряжение в якоре), получим противоэдс двигателя, которая вычитается из напряжения питания. В качестве задающего устройства используется Timer. Для поддержания скорости неизменной при набросе нагрузки используется ПИ-регулятор скорости. Далее установлен ПИ-регулятор тока. Коэффициент обратной связи по скорости и току составляет 0,03.
Углы управления группами тиристоров, до запуска, отличаются друг от друга на π/2, далее углы формируются системой управления путем вычитания. Причем их величина, поданная на СИФУ не должна превышать диапазона (170° ÷ -170°).
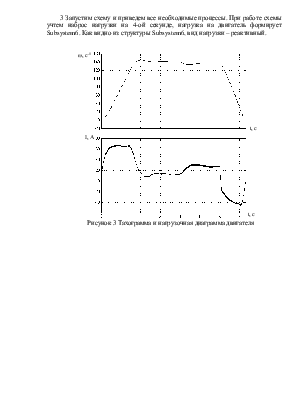
3 Запустим схему и приведем все необходимые процессы. При работе схемы учтем наброс нагрузки на 4-ой секунде, нагрузка на двигатель формирует Subsystem6. Как видно из структуры Subsystem6, вид нагрузки – реактивный.
|
|
|
|
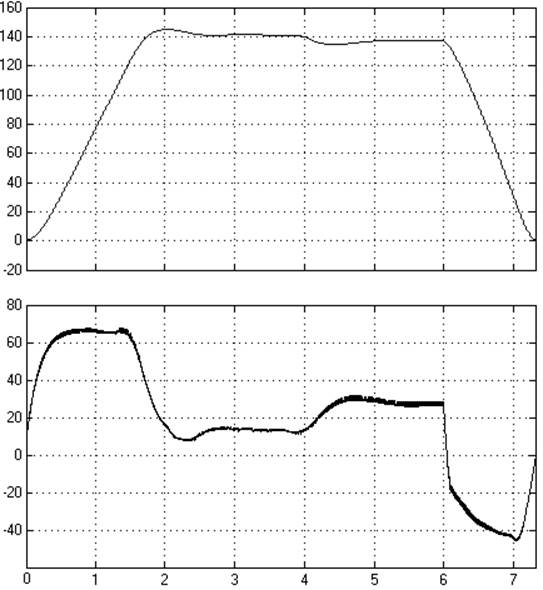
Рисунок 3 Тахограмма и нагрузочная диаграмма двигателя
|
|
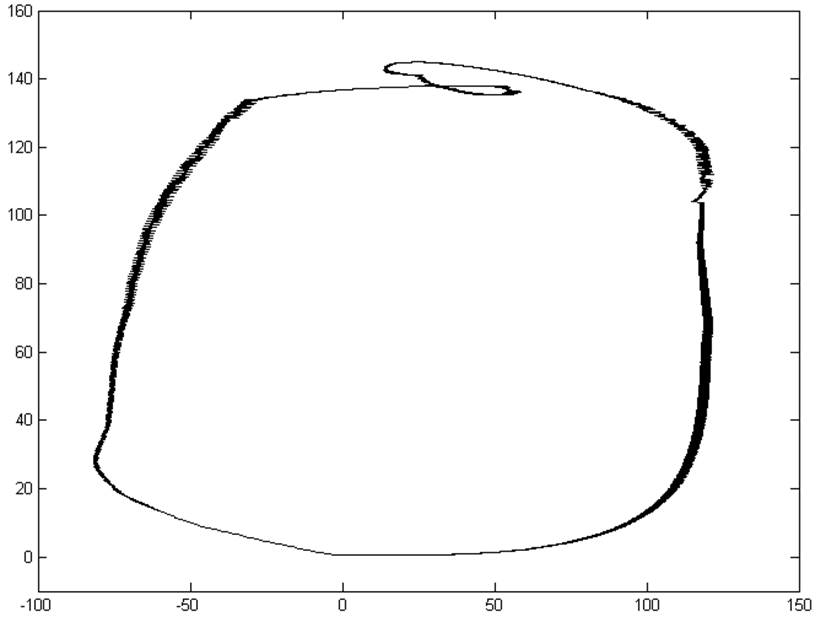
Рисунок 4 Механическая характеристика системы стабилизации скорости
4 Вывод: система стабилизации стремится «вернуть» значение скорости, установленной оператором или программой, при изменении условий работы (при пуске, при набросе/сбросе нагрузки, при торможении и реверсе); при этом вследствие инерционности механической части двигателя и механизма (Тм) и электрической части электропривода (постоянные времени тиристоров Tμ, двигателя Та), установление требуемого значения происходит не мгновенно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.