Аналогично вводится понятие системы координат на плоскости, которая используется уже для определения положения точек на плоскости.
![]() у
у
![]()
 М2
М(х,у)
М2
М(х,у)
0 М1 х
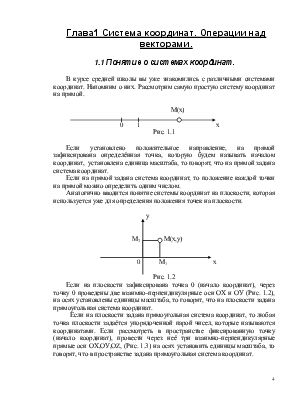
Если на плоскости зафиксирована точка 0 (начало координат), через точку 0 проведены две взаимно-перпендикулярные оси ОХ и ОУ (Рис. 1.2), на осях установлены единицы масштаба, то говорят, что на плоскости задана прямоугольная система координат.
Если на плоскости задана прямоугольная система координат, то любая точка плоскости задаётся упорядоченной парой чисел, которые называются координатами. Если рассмотреть в пространстве фиксированную точку (начало координат), провести через неё три взаимно-перпендикулярные прямые оси ОХ,ОУ,ОZ, (Рис. 1.3) на осях установить единицы масштаба, то говорят, что в пространстве задана прямоугольная система координат.
![]() z
z
![]()
![]()
![]()
 М3
М3
![]() М(х,у,z)
М(х,у,z)
![]()
![]()

![]() 0 М2
у
0 М2
у
М1 Р(х,у)
х
В пространстве каждой точке соответствуем единственная упорядоченная тройка чисел. Справедливо и обратное утверждение.
1.2 Понятие вектора. Действия над векторами.
Введём теперь в рассмотрение понятие векторной величины.
· Скалярная величина – это такая величина, которая определяется только числовым значением. (масса, плотность, объем, и т.д.). В математике определение вектора даётся абстрактно.
· Вектором называют отрезок прямой на котором установлено направление.
 А – начало вектора
В
А – начало вектора
В ![]() В – конец вектора
В – конец вектора
Обозначения:
![]()
![]() А
А
Рис. 1.4
Расстояние между началом и концом вектора называют длиной
вектора (модулем) обозначают ![]() или
или ![]() .
.
· Если начало и конец вектора совпадают то вектор называется нулевым.
· Векторы ![]() и
и
![]() называются коллинеарными, если
они лежат на одной прямой или на параллельных прямых.
называются коллинеарными, если
они лежат на одной прямой или на параллельных прямых.
· Два вектора ![]() и
и
![]() называются равными если:
называются равными если:
o Их длины равны, т.е. ![]()
o Они коллинеарные
o Одинаково направлены
· Векторы ![]() и
и
![]() называются противоположными:
называются противоположными:
o Их длины равны
o Они коллинеарные
o Они противоположно направленные
· Суммой двух векторов ![]() и
и ![]() называется
вектор
называется
вектор ![]() проведённый из начала вектора
проведённый из начала вектора ![]() в конец вектора
в конец вектора ![]() , если конец вектора
, если конец вектора ![]() и начало вектора
и начало вектора ![]() совмещены (Рис. 1.5)
совмещены (Рис. 1.5)
![]()
 |
Рис. 1.5
Операция сложения векторов обладает свойством переместительности и сочетательности
1) ![]() (переместительные)
(переместительные)
2)![]() (сочетательные)
(сочетательные)
Операция вычитания векторов вводится как операция, обратная сложению.
·
![]() Разностью двух
векторов
Разностью двух
векторов ![]() и
и ![]() называется
такой вектор
называется
такой вектор ![]() , что
, что
![]() +
+![]() =
=![]()
 Вектор
Вектор проведён из
конца вектора ![]()
в конец
вектора ![]() , если начало
, если начало
![]()
![]() и
и ![]() совмещены.
совмещены.
Рис. 1.6
· произведением вектора ![]() на число
на число ![]() называется вектор
называется вектор ![]() обладающий следующими
свойствами:
обладающий следующими
свойствами:
1.
![]() =
=![]()
2.
Вектор ![]() коллинеарен вектору
коллинеарен вектору ![]() и направлен также как вектор
и направлен также как вектор ![]() , если
, если ![]() и противоположен вектору
и противоположен вектору ![]() если
если ![]() .
.
Свойства умножения вектора на число:
а) ![]()
б) ![]()
в) ![]()
Используя операцию умножения вектора на число можно ввести аналитическое условие коллинеарности двух векторов.
· Чтобы вектора ![]() и
и
![]() были коллинеарными необходимо и
достаточно, чтобы выполнялось равенство:
были коллинеарными необходимо и
достаточно, чтобы выполнялось равенство:
![]() =
=![]()
где ![]() -
некоторое число.
-
некоторое число.
Прежде чем перейти к исследованию связи векторов и систем координат необходимо ввести ещё одну операцию действия над векторами, это проекция вектора на ось.
· Числовой проекцией вектора ![]() на ось
на ось ![]() называется число равное длине
вектора
называется число равное длине
вектора ![]() где
где ![]() и
и
![]() проекции на ось
проекции на ось ![]() соответственно точек А и В
взятое со знаком ‘-’ если направление вектора
соответственно точек А и В
взятое со знаком ‘-’ если направление вектора ![]() совпадает
с направлением оси
совпадает
с направлением оси ![]() и со знаком ‘-’ если
направление вектора
и со знаком ‘-’ если
направление вектора ![]() противоположно
направлению оси
противоположно
направлению оси ![]() . Проекция вектора
. Проекция вектора ![]() на ось
на ось ![]() обозначается (Прl
обозначается (Прl![]() )
)
![]()

![]()
![]()
![]()
![]()
![]()
 |
|||
![]()
![]()
![]()
![]()
![]()
 |
|||
Таким образом:
Прl![]() , если направление
, если направление ![]() совпадает с осью
совпадает с осью ![]()
Прl![]() , если направление вектора
, если направление вектора ![]() противоположно оси
противоположно оси ![]() .
.
Свойства операций:
1. Проекция суммы векторов равна сумме проекций слагаемых векторов на ту же ось.
Прl![]() =Прl
=Прl![]() + Прl
+ Прl![]()
2.
Проекция вектора ![]() на ось
на ось ![]() равна длине вектора
равна длине вектора ![]() умноженной на косинус угла
умноженной на косинус угла ![]() между осью
между осью ![]() и вектором
и вектором ![]() т.е. Прl
т.е. Прl![]() =
=![]() .
.
3.
Постоянный множитель можно
выносить за знак проекции Пре![]() =
=
![]() Прl
Прl![]() .
.
Мы рассмотрели способ задания вектора с помощью определения его длины и направления. Однако большой интерес представляет способ задания вектора с помощью чисел.
Пусть в пространстве задана прямоугольная система
координат ОХУZ. Рассмотрим в пространстве произвольный вектор ![]() . Найдём его проекции на оси
координат и введём обозначения:
. Найдём его проекции на оси
координат и введём обозначения:
x=Прох![]()
y=Проу![]()
z=Проz![]()
x, y, z – координаты вектора.
![]() z
z
![]()
![]()
![]()
 М3
М3

![]()
 М(х,у,z)
М(х,у,z)
![]()
![]()

![]() 0 М2
у
0 М2
у
М1
х
Так как проекция вектора на ось определяется
однозначно, то каждому вектору ![]() соответствует единственная
упорядоченная тройка чисел x, y, z – координаты вектора
соответствует единственная
упорядоченная тройка чисел x, y, z – координаты вектора ![]() .
.
Рассмотрим операции над векторами, заданными своими координатами
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.