требование удовлетворяют две механические характеристики при углах управления равных 40° и 0°.
По известным паспортным данным асинхронного двигателя и параметрам Г-образной схемы замещения рассчитываю параметры Т-образной схемы замещения и параметры блоков модели.
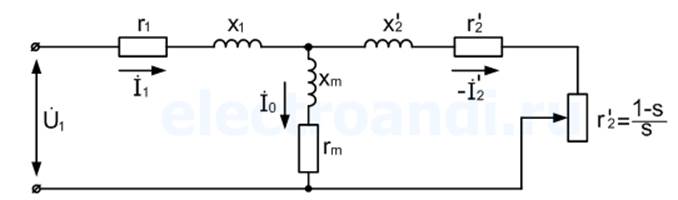
Рисунок 2.6 – Т-образная схема замещения
Номинальный фазный ток статора:
 A.
A.
Базисное значение сопротивления:
 Ом.
Ом.
Угловая частота тока:
![]() с-1.
с-1.
Реактивное сопротивление рассеяния статора в относительных единицах:
 .
.
Коэффициент, связывающий параметры машин в Т и Г-образных схемах замещения:
 .
.
Реактивное сопротивление рассеяния фазы статора:
 Ом.
Ом.
Активное сопротивление фазы статора:
 Ом.
Ом.
Индуктивность рассеяния фазы статора:
 Гн.
Гн.
Реактивное сопротивление рассеяния приведенной обмотки ротора:
 Ом.
Ом.
Активное сопротивление приведенной обмотки ротора:
 Ом.
Ом.
Индуктивность рассеяния приведенной обмотки ротора:
 Гн.
Гн.
Реактивное сопротивление взаимоиндукции:
![]() Ом.
Ом.
Индуктивность взаимоиндукции:
 Гн
Гн
Полная индуктивность фазы статора:
![]() Гн.
Гн.
Полная индуктивность фазы ротора:
![]() Гн.
Гн.
Суммарные потери мощности в двигателе:
 Вт.
Вт.
Основные потери в обмотке статора:
![]() Вт.
Вт.
Намагничивающий ток:
 А.
А.
Потери в стали статора:
![]() Вт
Вт
Основные потери в обмотке ротора:
 Вт.
Вт.
Суммарные потери в стали и механике:
![]() Вт.
Вт.
Механические потери:
![]() Вт.
Вт.
Скорость идеального холостого хода двигателя:
 с-1.
с-1.
Номинальная скорость вращения двигателя:
![]() с-1.
с-1.
Коэффициент трения:
 Нм*с.
Нм*с.
Скорость вращения электромагнитного поля статора можно определить по формуле:
 .
.
При
изменении частоты напряжения питания изменяется величина потока двигателя ![]() и одновременно с изменением
частоты напряжения необходимо регулировать его амплитуду.
и одновременно с изменением
частоты напряжения необходимо регулировать его амплитуду.
 .
.
При
частотном регулировании величина относительного скольжения зависит от разности
скоростей вращающегося электромагнитного поля и ротора и от относительного
значения ![]() частоты питающего напряжения
частоты питающего напряжения
 ,
,
 .
.
Здесь
![]() ,
, ![]() ,
,
![]() - регулируемые значения
частоты напряжения статора и соответствующие значения скорости вращения поля и
скольжения;
- регулируемые значения
частоты напряжения статора и соответствующие значения скорости вращения поля и
скольжения;
![]() и
и ![]() - номинальные значения
частоты статора и скорости поля, соответствующие паспортным данным двигателя.
- номинальные значения
частоты статора и скорости поля, соответствующие паспортным данным двигателя.
С
учётом формулы  получим:
получим:
 .
.
Для анализа электромеханических характеристик двигателя при частотном регулировании возьмем Т-образная схема замещения двигателя.
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
Однако,
при номинальной частоте 50 Гц индуктивное сопротивление контура намагничивания ![]() на порядок больше, чем
активное сопротивление обмотки статора
на порядок больше, чем
активное сопротивление обмотки статора ![]() .
.
При
анализе и расчёте электромеханических характеристик двигателя, работающего при
постоянной номинальной частоте напряжения, сопротивлением ![]() пренебрегаем.
пренебрегаем.
Мощность процесса скольжения, выделяемая в цепи ротора электродвигателя, расходуется на нагрев обмоток ротора как следует из формулы:
![]() .
.
Поэтому
![]() , откуда
, откуда  .
.
Учитывая,
что отношения ![]() и
и ![]() гораздо меньше единицы и ими
можно пренебречь, определим значение
гораздо меньше единицы и ими
можно пренебречь, определим значение ![]()
 .
.
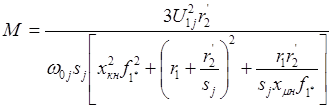
Если подставить это выражение, то получим формулу для построения механических характеристик двигателя при переменных значениях величины и частоты напряжения питания.
 .
.
Если
предположить, что ![]() , найдём значение
максимального момента и критического скольжения электродвигателя:
, найдём значение
максимального момента и критического скольжения электродвигателя:
 ,
,
 .
.
Знак (+) соответствует двигательному режиму, знак (-) – режиму рекуперативного торможения.
Если пренебрегать величиной активного сопротивления статора, то, для того чтобы при частотном регулировании сохранять критический момент постоянным, нужно величину напряжения изменять пропорционально изменению частоты.
 , где
, где
 .
.
При
малых частотах, когда значение падения напряжения на сопротивлении ![]() становится больше, поток
двигателя уменьшается и соответственно уменьшается момент
становится больше, поток
двигателя уменьшается и соответственно уменьшается момент ![]() .
.
Следовательно, для того чтобы регулировать скорость асинхронного двигателя, сохраняя максимальный момент двигателя неизменным, необходимо величину напряжения уменьшать в меньшей степени, чем уменьшается частота, примерно в следующем соотношении:
![]() .
.
Произведём
расчет для частоты f1=25
гц( ).
).
Так
как  , то
, то ![]() В, тогда
В, тогда
![]() В.
В.
Согласно формуле критический момент определится как:
 Нм, а
критическое скольжение ротора:
Нм, а
критическое скольжение ротора:
 .
.
Для остальных точек значение момента и скольжения определяются по формулам и соответственно.
Механические характеристики электродвигателя приведены на рисунке 2.7. Как видно закон управления U/f=const обеспечивает высокий запас устойчивости по скорости, жесткость механической характеристики и широкий диапазон регулирования скорости.
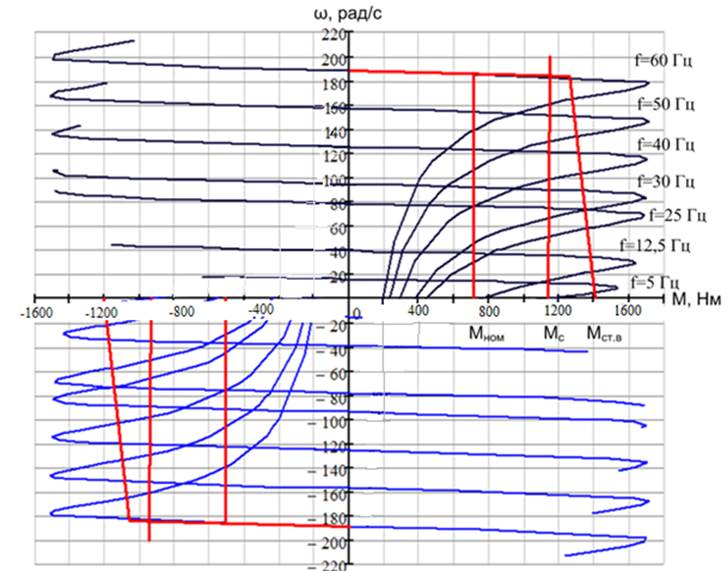
Рисунок 2.7 - Механические характеристики при разных частотах
В настоящее время в электроприводе при создании системы автоматического управления нашел широкое применение принцип подчиненного регулирования координат с последовательной коррекцией.
При построении таких систем объект управления представляется в виде цепочки последовательно соединенных звеньев с передаточными функциями W01(p), W02(p), W0i-1(p), W0i(p), выходными параметрами которых являются контролируемые координаты объекта: напряжение, частота, ток, скорость и т.д.
Для построения системы автоматизированного управления электроприводом определяем передаточные функций объекта регулирования, обратных связей, синтезируем регуляторы координат и технологических параметров.
Рассмотрим при синтезе системы регулирования частоты вращения привода скипового подъемника упрощенную математическую модель асинхронного двигателя, с двумя регулируемыми координатами – момент и скорость двигателя.
Асинхронный двигатель по данной модели можно представить двумя звеньями с передаточными функциями
Механическая часть:
 .
.
Электромеханическая часть:
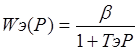 .
.
Структурная схема модели двигателя представлена на рисунке 2.8.
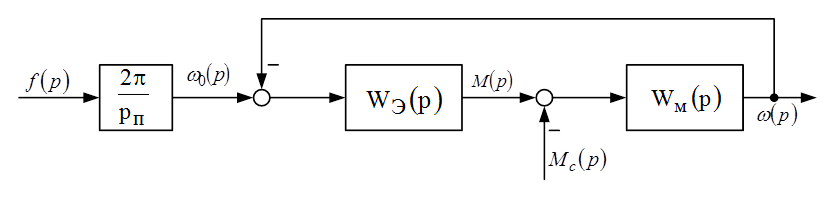
Рисунок 2.8 – Упрощенная структурная схема асинхронного двигателя
Основные параметры указанных звеньев β, Тм, Тэ, определяем по следующим формулам.
Коэффициент жесткости на рабочей характеристике:

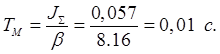
Электромеханическая постоянная времени:
Эквивалентная электромагнитная постоянная времени цепей статора и ротора АД:
 где:
где: ![]() –
угловая скорость электромагнитного поля двигателя.
–
угловая скорость электромагнитного поля двигателя.
![]()
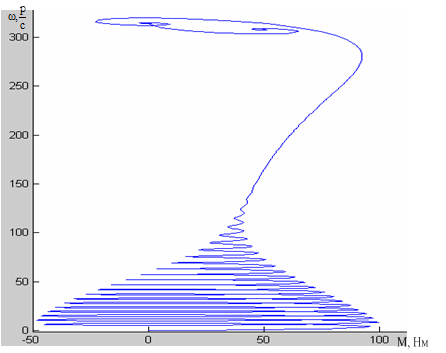
Рисунок 2.9 - Динамическая механическая характеристика АД полученная
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.