

















Тольяттинский политехнический институт
Кафедра «Детали машин»
Курсовой проект
по дисциплине
Детали машин
Руководитель:
Студент:
Группа: Т – 403
(оценка) ………«………»….…….2000 г.
Тольятти 2000 г.
Содержание вариант 6.5.
1. Выбор электродвигателя и кинематический расчет привода 3
2. Расчет клиноременной передачи 6
3. Расчет двухступенчатого цилиндрического редуктора 8
4. Предварительный расчет валов 12
5. Конструктивные размеры корпуса редуктора 13
6. Определение реакций в подшипниках 14
7. Проверочный расчет подшипников 17
8. Проверочный расчет шпонок 18
9. Уточненный расчет валов 19
10. Смазка зубчатых зацеплений и подшипников 23
Расчет требуемой мощности двигателя. Р
Рдв ![]() ;
;
1 2 3 34 0,950,970,970,993 0,87,
1 0,95 - КПД ременной передачи; 2 3 0,97 - КПД зубчатой косозубой передачи с цилиндрическими колесами; 4 0,99 - КПД подшипников качения. Тогда
Ррдв
![]()
5 кВт.
5 кВт.
Расчет требуемой частоты вращения.
nрдв nu ; u u1 u2 u3 233 18, u1 2; u2 3; u3 3 - передаточные числа. Тогда nрдв 10218 1836 об/мин .
По таблице принимаем мощность двигателя Р = 5,5 кВт; частоту вращения 3000 об/мин. Синхронная частота вращения двигателя равна 2880 об/мин. Модель электродвигателя: 100L2.
Определение передаточных чисел.
![]() nдв 2880 Фактическое
передаточное число привода: uф
28.
nдв 2880 Фактическое
передаточное число привода: uф
28.
n 102
Передаточные числа редуктора:
uф 28uред 14
![]()
![]()
![]()
![]() uред 14; uт(3) 0,95 uред 0,95 14 3,55; uб(2) 3,9; поu1 2u т 3,55
uред 14; uт(3) 0,95 uред 0,95 14 3,55; uб(2) 3,9; поu1 2u т 3,55
лученные значения округляем до стандартных: uт(3) 3,55; uб(2) 4,0 .
Расчет частот вращения.
n 2880
![]() n1 nдвиг 2880 об/мин ; n2 1 1440 об/мин
;
n1 nдвиг 2880 об/мин ; n2 1 1440 об/мин
;
u1 2
![]()
![]() n2 1440 360 об/мин ; n4 n3 360 100 об/мин ; n3
n2 1440 360 об/мин ; n4 n3 360 100 об/мин ; n3
u2 4,0 u3 3,55
![]()
![]() n1 300 c1 ; 2 1 300 150
c1;
n1 300 c1 ; 2 1 300 150
c1;
1
30 u1 2
![]()
![]()
![]() 2 150 38 c1 ; 4 3 11c1.
2 150 38 c1 ; 4 3 11c1.
3 u2 4,0 u3
Расчет крутящих моментов.
![]()
![]() р 4300 Т4 430 126
Нм;
р 4300 Т4 430 126
Нм;
Т4 430 Нм ; Т3
4 10 u3 3 4 3,550,970,99
![]()
![]() Т3 126 33
Нм; Т1 Т2 33 18 Нм .
Т3 126 33
Нм; Т1 Т2 33 18 Нм .
Т2
u2 2 4 4,00,970,99 u1 1 4 20,950,99
|
I |
II |
III |
|
|
Т1, Нм |
18 |
33 |
126 |
|
Т2, Нм |
33 |
126 |
430 |
|
n1, об/мин |
2880 |
1440 |
360 |
|
n2, об/мин |
1440 |
360 |
100 |
|
1, с1 |
300 |
150 |
38 |
|
2 , с1 |
150 |
38 |
11 |
|
u |
2 |
4,0 |
3,55 |
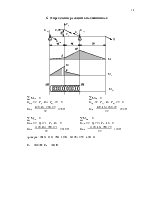
![]() Выбираем
сечение клинового ремня, предварительно определив угловую скорость и
номинальный вращающий момент ведущего вала: n1 3,142880 301,6
рад/с;
Выбираем
сечение клинового ремня, предварительно определив угловую скорость и
номинальный вращающий момент ведущего вала: n1 3,142880 301,6
рад/с;
1
30 30
![]() N 5000 М1 16,6 Нм.
N 5000 М1 16,6 Нм.
1 301,6
При таком значении вращающего момента принимаем сечение ремня типа А, минимальный диаметр Dmin 90 мм . ПринимаемD1 100 мм .
Определяем передаточное отношение i без учета скольжения
![]() n1 2880 2. i n2 1440
n1 2880 2. i n2 1440
Находим диаметр D2 ведомого шкива, приняв относительное скольжение ε = 0,02:
D2 iD11 210010,02196 мм .
Ближайшее стандартное значение D2 200 мм . Уточняем передаточное отношение i с учетом ε:
![]() D2 200 2,04 . i
D2 200 2,04 . i
D11 10010,02
Пересчитываем:
![]() n1 2880 1412 . n2 i 2,04
n1 2880 1412 . n2 i 2,04
Расхождение с заданным составляет 1,9%, что не превышает допустимого значения 3%.
Определяем межосевое расстояние а: его выбираем в интервале а min 0,55D1 D2 h 0,55100 2008 173 мм;
а max 2D1 D2 2100 200 600 мм принимаем близкое к среднему значение а = 400 мм. Расчетная длина ремня:
2 2
Lp 2a
![]() D1 D2
D1 D2 ![]() D2 D1 2400
D2 D1 2400 ![]() 3,14 300
3,14 300 ![]() 100 1277 мм .
100 1277 мм .
2 4a 2 4400
Ближайшее стандартное значение L = 1250 мм, L0 1700 мм .
Вычисляем
Dср 0,5D2 D1 0,5300 150 мм и определяем новое значение а с учетом стандартной длины L:
 а 0,25L Dср L
Dср 2 2D2 D1 2
а 0,25L Dср L
Dср 2 2D2 D1 2
0,251250 1503,14 1250 1503,142 21002 386 мм
Угол обхвата меньшего шкива 1 18060 ![]() D2
D1 18060
D2
D1 18060 ![]() 100 175,2 a 1250
100 175,2 a 1250
Скорость
v 0,51D1 0,5301,6100 15 м/с
По таблице определяем величину окружного усилия р0 , передаваемого клиновым ремнем: р0 138 Н на один ремень.
С 10,0031801 10,003180175,2 0,9856.
Коэффициент, учитывающий влияние длины ремня:
L 1250
СL 0,3 ![]() 0,7
0,3
0,7
0,3 ![]() 0,7
0,99.
0,7
0,99.
L0 1700
Коэффициент режима работы при заданных условиях Ср 1,1, тогда допускаемое окружное усилие на один ремень:
р р0ССLСр 1380,98560,991,1148 Н .
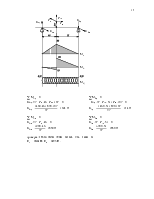
Определяем окружное усилие:
![]() N 5000 Р 335 Н.
N 5000 Р 335 Н.
v 15
Расчетное число ремней:
![]() z Р 335 2,3 3.
z Р 335 2,3 3.
р 148
Определяем усилия в ременной передаче, приняв напряжение от предварительного натяжения 0 1,6 Н/мм2.
Предварительное натяжение каждой ветви ремня:
S0 0F 1,681129,6 Н; рабочее натяжение ведущей ветви
P 335
S1 S0 ![]() 129,6
129,6 ![]() 185,4 Н ;
185,4 Н ;
2z 23
рабочее натяжение ведомой ветви
P 335
S2 S0 ![]() 129,6
129,6 ![]() 73,8 Н;
73,8 Н;
2z 23
усилие на валы
![]()
![]() 1 2129,63sin175,2 777 Н .
1 2129,63sin175,2 777 Н .
Q 2S0zsin
2 2
Шкивы изготавливать из чугуна СЧ 15-32, шероховатость рабочих поверхностей Rа 2,5 мкм .
Для обеих ступеней принимаем:
Колесо: материал – сталь 40Х, термообработка – улучшение; Н2 235...269 НВ.
Шестерня: материал – сталь 40Х, термообработка – улучшение; Н1 269...302 НВ. Передача реверсивная.
Для расчета принимаем: Н1 285 НВ, Н2 252 НВ.
Коэффициент долговечности при длительной эксплуатации принимаем КHL 1; коэффициент запаса прочности nH 1,1; nF 1,75.
Рассчитаем
допускаемые контактные напряжения: Н ![]() НlimbKHL , Нlimb
2HB 70.
НlimbKHL , Нlimb
2HB 70.
nH
Н1 ![]() 2285
70 582 МПа; Н2
2285
70 582 МПа; Н2 ![]() 2252
70 522 МПа
2252
70 522 МПа
1,1 1,1
Н 0,45Н1 Н2 0,45582 522 497 МПа
Рассчитаем допускаемые напряжения изгиба:
FlimbKFdKFgKFcKFL
F ![]() , Flimb 1,8HB.
, Flimb 1,8HB.
nF
F1 ![]() 230 МПа;
230 МПа;
F2 ![]() 202 МПа
202 МПа
Коэффициент на форму зуба Ка 430; коэффициент нагрузки КН 1,1; коэффициент ширины венцов ba 0,4; коэффициент, учитывающий динамическую нагрузку, возникающую в зацепленииКНv 1,02; коэффициент, учитывающий распределение нагрузки между зубьямиКН 1
Расчет третьей (тихоходной) ступени.
Межосевое расстояние:
T2KН 4301,1
 а
Ка u 13 2Н u2 4304,553 4972 3,552 0,4 142
мм ,
а
Ка u 13 2Н u2 4304,553 4972 3,552 0,4 142
мм ,
ba
принимаем значение из стандартного ряда: а = 140 мм.
Нормальный модуль: m 0,01...0,02а 1,4...2,8 мм , принимаем среднее значение, соответствующее стандартному: m = 2 мм.
Принимаем предварительно угол наклона зубьев β = 15˚ и определяем числа зубьев шестерни и колеса:
![]() z3 2acos
2140cos15
29,7 30
z3 2acos
2140cos15
29,7 30
u 1m 4,552 z4 z3u 303,55 107
Уточняем значение угла β:
![]() cos z3mu 1
3024,55 0,975; 125019.
cos z3mu 1
3024,55 0,975; 125019.
2a 2140
Основные размеры шестерни и колеса: диаметры делительные:
mz
d ![]() ; cos
; cos
d3 ![]() 61мм; d4
61мм; d4 ![]() 219 мм , проверка:
219 мм , проверка: ![]() 140 мм .
140 мм .
Диаметры вершин зубьев: da d 2m;
da3 61 4 65 мм; da4 219 4 223 мм , диаметры впадин: df d 2,5m;
df3 615 56 мм; df 4 2195 214 мм .
Ширина колеса: b4 baa 0,4140 56 мм .
Ширина шестерни:
b3 b4 5...10 56 6 62 мм .
Окружная скорость колеса тихоходной ступени:
![]() 3d3 3860 1,14 м/с. v
3d3 3860 1,14 м/с. v
2 2
При данной скорости назначаем 9-ю степень точности.
Коэффициент нагрузки для проверки контактных напряжений:
КН КНКНvКН 1,11,0211,122. Проверяем контактные напряжения:
 Н ZHZMZ u41
T2KHK2aH3KbaHv u 1
,
Н ZHZMZ u41
T2KHK2aH3KbaHv u 1
,
ZH 2cos, 20; ZM 275; Z 1 , sin2
1 1
![]() 1,883,2 z3 z4 cos
1,883,2 z3 z4 cos

![]() ZH 2sin0,97540 1,74;
1,883,2301 1071 0,975 1,7; Z
11,7 0,77;
ZH 2sin0,97540 1,74;
1,883,2301 1071 0,975 1,7; Z
11,7 0,77;
4,55 430103 11,11,024,55
 H 1,742750,77 4 2 3 0,4 440 МПа 497 МПа.
H 1,742750,77 4 2 3 0,4 440 МПа 497 МПа.
140 Проверяем изгибные напряжения:
![]()
F YFYYKFKFv z32 2T1 3 ,
bdm
YF 3,6; Y 1; Y 0,91; KF 1,3; KFv 1,04.
2126103
F 3,610,911,31,04![]() 302 0,9123 170 МПа 202 МПа.
302 0,9123 170 МПа 202 МПа.
Силы, действующие в зацеплении тихоходной ступени: окружная:
![]() Ft 2T2 2430103 3,9 кН; d4 219
Ft 2T2 2430103 3,9 кН; d4 219
![]() Ft tg 3,9tg20 1,46
кН;
Ft tg 3,9tg20 1,46
кН;
Fr cos 0,975
Fa Ft tg 3,9tg125019 0,89 кН.
![]() Определим тип
используемых подшипников:
Определим тип
используемых подшипников:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.