2.4. Назначение и состав заданного электропривода.
Однокоординатные шестипульсные тиристорные преобразователи „КЕМРОН" с высокомоментными двигателями постоянного тока предназначены для электропривода металлорежущих машин с ЧПУ.
1.1. Комплектность электропривода
В комплект входят следующие основные узлы:
— однокоординатный шестипульсный преобразователь — 1 шт
— силовой трансформатор — 1 шт.
— уравнительные дроссели — 2 шт.
— двигатель — 1 шт.
1.2. Условия работы
— температура окружающей среды — от +5° С до +45° С.
— допускаемая влажность — 80% при 30" С
— высота над уровнем моря — до 1000т.
— окружающая среда должна отвечать следующим требованиям: взрывобезопасность, запрещается наличие токопроводимой пыли, активных газов и паров с концентрацией, оказывающей разрушительное воздействие на металл и изоляцию.
1.3. Конструкция
Тиристорные преобразователи представляют собой однокоординатные модули, имеют блочную конструкцию, обеспечивающую оперативную смену блоков и свободный доступ ко всем контрольным точкам и элементом.
В конструктивном отношении преобразователь состоит из тиристорного блока и блока управления.
Блок управления включает в себя четыре платы: „Питание", „Фазовое управление", „Логика" и „Регуляторы". Одна из них „Питание", закреплена неподвижно над тиристроным блоком, а остальные по порядку-установлены перед ней на апарате, который обеспечивает вращение каждой из них вокруг неподвижной оси.
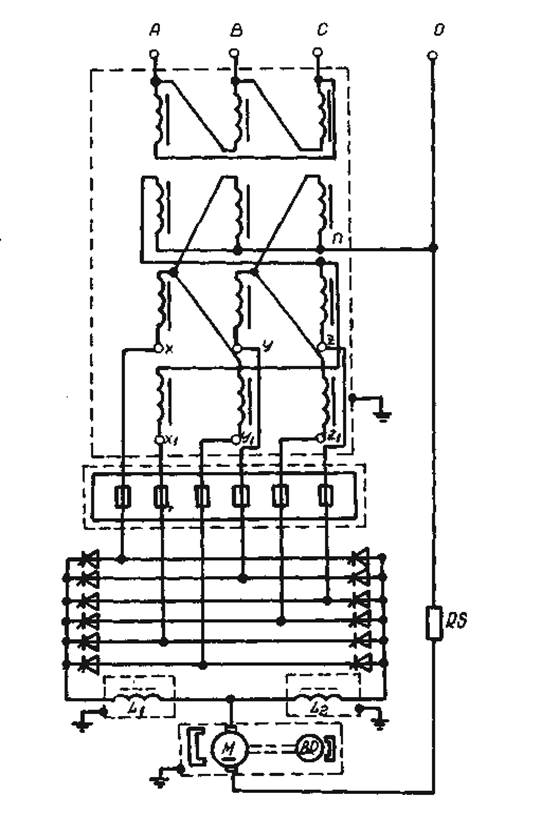
Тиристорный блок представляет собой два управляемых выпрямителя по шестипульсный схеме, имеющей среднюю точку. Схема тиристорного блока и его соединение с силовым трансформатором даны на рис. 1Используются следующие типы тиристоров: Т10-40 для 4АЕВ16, Т10-80 для 8АЕВ16 и ТЛ-160 18АЕВ16.
С целью защиты тиристоров от коммутационных перенапряжений, паралельно к каждому из них подключены RC-группы.
1.4. Устройство и принцип работы:
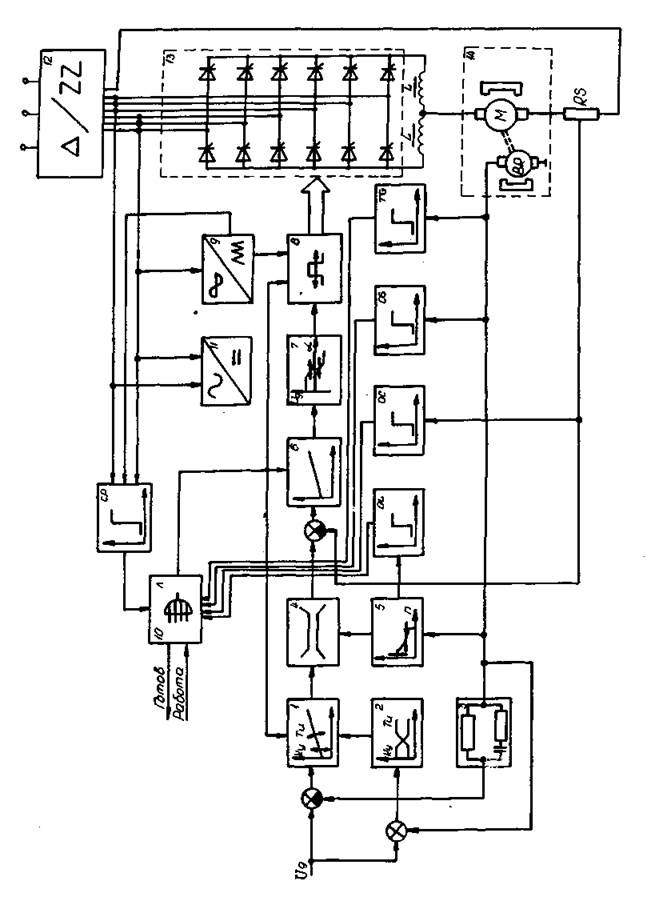
Электропривод представляет собой систему автоматического регулирования скорости вращения высокомоментного двигателя, выполненной по двухконтурной схеме с подчиненным регулированием, обеспечивающей высокие статические и динамические показатели.
На рис. 2 изображена структурная схема привода:
1. Регулятор скорости /PC/
2. Адаптация регулятора скорости
3. Корректирующее звено
4. Токоограничение
5. Динамическое токоограничение
6. Регулятор тока /РТ/
8. Блок формирования управляющих импульсов
9. Блок синхронизации
10. Блок логики
11. Блок питания
12. Силовой трансформатор
13. Силовой управляемый выпрямитель
14. Двигательный агрегат
|
|
М - высокомоментный двигатель постоянного тока BR-тахогенератор
L - уравнительние дроссели
RS - датчик тока
СР - защита от обрыва фазы, от неправильного соединения вторичных обмоток силового трансформатора, от обрыва пилообразного напряжения и от обрыва напряжения питания — 30V.
ОС — защита от превышения максимального тока и от обрыва обратной связи по току.
OS — защита от превышения максимальной скорости.
TG — защита от отсутствия обратной связи по скорости.
OL — защита от перегрузки электродвигателя во время работы.
Регулятор скорости пропорционально-интегрально-дифференциальный и состоит из операционных усилителей с независимой настройкой пропорционального и интегрального коэффициентов.
Предусмотрена возможность плавно изменять параметры регулятора с целью облегчения настройки электропривода.
Обратная связь по скорости осуществляется тахогенератором /TG/. С целью изменения коэффициента усиления, в зависимости от скорости в узле адаптации, используются широчинно-импульсные модуляции. Корректирующие звенья /В/ служат для улучшения динамических параметров привода.
Ограничение тока осуществляется на выходе регулятора скорости по принципу ограничения напряжения, являющегося заданием тока.
Динамическое токоограничение является функцией скорости вращения двигателя и осуществляется по принципу ограничения напряжения на выходе регулятора скорости в соответствии с коммутационной кривой электродвигателя.
Регулятор тока также пропорционально-интегрален. Его выход связан с входом узла для определения и регулирования уравнивающего тока.
Управление тиристоров осуществляется при помощи схемы фазового управления, выполненной по вертикальному принципу с линейными опорными напряжениями. Она состоит из трех одинаковых каналов, имеющих блок для синхронизации и блок для формирования управляющих импульсов. Блок для формирования управляющих импульсов осуществляет также функцию распределения импульсов для управления тиристорами. При неисправности блок „Логика" подает сигнал, который запрещает работу путем блокировки импульсов.
Предназначение блока „Логика" — обеспечивать правильную работу электропривода и предохранять его от возможных аварий.
Нормальная работа обеспечивается путем одновременного блокирования регуляторов и блокирования управляющих импульсов.
Уровень срабатывания защит ОС и OS определяется в зависимости от типа электродвигателя и настраивается заводом изготовителем электроприводов.
Настройка защиты OL также зависит от типа электродвигателя и выбирается так чтобы защита сработала при реверсе на максимальных /max/ оборотах электродвигателя с дополнительным инерционным моментом.
|
Номинальный момент вращения Nm |
13и21 |
17и23 |
47и70 |
100 |
130 |
170 |
|
Инерционный момент kgm2 |
0,015 |
0,015 |
0,030 |
0,125 |
0,14 |
0,15 |
Срабатывание защит и нормальное состояние электропривода регистрируются световой индикацией. При срабатывании какой либо из защит, запуск электропривода после восстановления нормального состояния возможен только повторной подачи сигнала, допускающего работу.
Блок питания обеспечивает напряжения необходимые для питания блока электроники— ±15V, +24V, -30V.
Чтобы стабилизировать напряжения +15V, используются универсальные интегральные стабилизаторы на напряжении типа МАА723. В блоке питания предусмотрена защита от обрыва напряжения—15V.
При уменьшении этого напряжения ниже определенного уровня, блокируется также подача напряжения +15 V.
|
|
Рис 2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.