позволяет производить запись в регистры, если после чтения младшего слова не будет прочитано старшее.
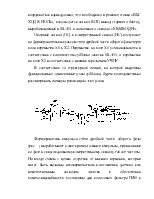
Сигнал «СТРОБ» для записи в регистры формируется одновибратором на элементе D23 по положительному фронту импульса записи ИЗ. Длительность импульса «СТРОБ» определяется элементами С29, R37. Одновибратор возбуждается по входу С2 при условии, если на входах 1 и С1 сигнал нулевого уровня. Этот разрешающий сигнал формируется элементом D15.4, если нет обращения к субблоку, то есть отсутствует сигнал «АДРЕС», и если прочитано старшее слово, то есть сброшен триггер памяти младшего слова на элементе D9.2. Триггер взводится при обращении к адресу младшего слова и сбрасывается при обращении к адресу старшего слова. При включении сброс триггера производится аппаратным сигналом «СБРОС».
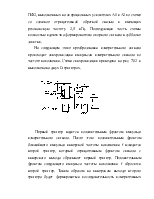
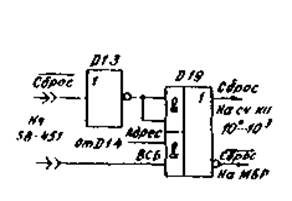
Сброс выходных регистров и счетчиков полных оборотов фазы производится узлом сброса, схема которого приведена на рис .
|
|
Как уже отмечалось, существует два режима сброса, общий для всех субблоков, осуществляемый аппаратным сигналом «СБРОС», и индивидуальный, осуществляемым программно сигналом «ВСБ» при обращении к адресу конкретного субблока оцифровки. Сигнал «СБРОС» формируется в SB-451 из канального сигнала «К СБРОС Н», а сигнал «ВСБ» из канального сигнала «К ВЫВОД Н» в цикле «ВЫВОД». Сброс по сигнала «ВСБ» будет произведен только при наличии на входе D19 сигнала «АДРЕС», что свидетельствует о том, что идет обращение именно к данному субблоку. Режим программного сброса используется в режиме выхода в ноль координат станка. Сброс полного числа оборотов фазы производится постоянно после прихода сигнала «точный датчик» до момента прохождения фазой нулевого положения.
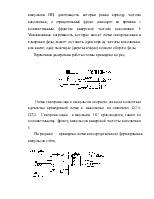
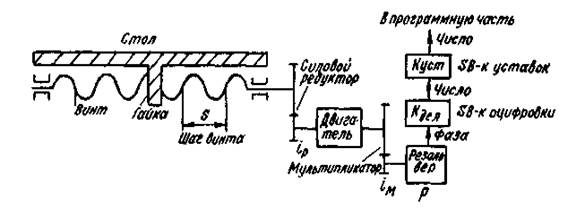
Привязка субблока оцифровки к масштабу линейного перемещения. При стыковке устройства ЧПУ со станком необходимо привести в соответствие величину реального перемещения координаты с числом, поступающим в программную часть для произведения расчётов. Если принять во внимание, что дискретность перемещений, в которой работает программная часть, равна 1 мкм, то величина перемещений в мкм должна быть равна числу, поступающему в программную часть. То есть повернуть винт на полный оборот, то при шаге винта S=10 мм/об стол переместится на величину 10000 мкм. Такое же число должно поступить и в программную часть.
Рис. позволяет наглядно проследить связь субблока оцифровки с линейной координатой станка. На рисунке приняты обозначения:
|
|
S — шаг винта, или величина перемещения линейной координаты при повороте винта на полный оборот. На серийных станках с ЧПУ модели 6Р13ФЗ-37, ГФ2171, 6Т13ФЗ, выпускаемых на ГСПО, на координатах X и Y S =10 мм/об, на координате Z S = 5 мм/об;
ip — передаточное отношение силового редуктора со стороны вала винта. Для указанных моделей станков на координата X и Y ip = 2, на координате Z ip = 1;
im — передаточное отношение мультипликатора со стороны вала двигателя. Для станков указанных моделей с датчиками типа ВТМ im= 2.5. Мультипликатор в двигателе привода «Мезоматик» отсутствует. В двигателях привода «Кемрон» im = 2,5 (реже im = 5).
С точки зрения измерительной системы резольвер характеризуется числом пар полюсов р, которое связывает число оборотов фазы измерительного сигнала резольвepa с числом оборотов его вала следующим соотношением: Nфазы= p Nвала, где N — число оборотов.
Субблок оцифровки характеризуется коэффициентом деления оборота фазы при fнап = 2.5 мГц Кдел = 1000, при fнап = 5 мГц Кдел = 2000.
В субблоке уставок, если это необходимо, устанавливается коэффициент, посредством которого приводятся в соответствие реальное перемещение координат числу, поступающему в программную часть. Если Куст> 1, число субблока оцифровки умножается на величину коэффициента, если Куст<1 — делится.
Исходя из сказанного следует, что если мы повернем винт на полный оборот, то величина перемещения линейной координаты, численно равная шагу винта в мкм должна быть равна S(мкм) = ip im p Kдел Kуст.
Варьируемыми величинами для соблюдения равенства могут выступать Кдел и Куст. Однако при Куст> 1 (умножение) число, поступающее в программную часть, будет изменяться с дискретностью Δ = δ Куст, где δ = 1 мкм — дискретность устройства ЧПУ. Это приведет к тому, что точность отработки заданного перемещения будет равна величине Δ. Например, при Куст=4 привод будет сканировать около заданной точки в зоне 4 мкм. Поэтому более предпочтительно сначала делать умножение на два (если это необходимо — аппаратов в субблоке оцифровки), а затем, если этого недостаточно, воспользоваться коэффициентом умножения в плате уставок.
Для станков с дискретностью координат 10 мкм сказанное выше
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.