В настоящее время частотные дальномеры широко используются в качестве датчиков уровня и расстояния.
Работа дальномера основа на сравнении излученного и отраженного сигналов, промодулированных по частоте. Возможны гармонический, треугольный, пилообразный и другие законы модуляции. Чаще всего используется модуляция по треугольному закону.
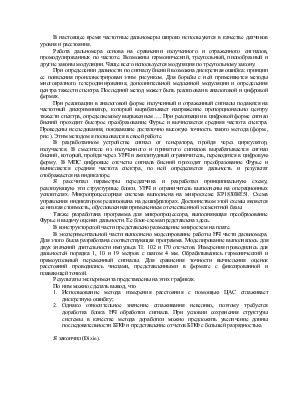
При определении дальности по сигналу биений возможна дискретная ошибка; принцип ее появления проиллюстрирован этим рисунком. Для борьбы с ней применяются методы многократного гетеродинирования, дополнительной медленной модуляции и определения центра тяжести спектра. Последний метод может быть реализован в аналоговой и цифровой формах.
При реализации в аналоговой форме излученный и отраженный сигналы подаются на частотный дискриминатор, который вырабатывает напряжение пропорционально центру тяжести спектра, определяемому выражением …. При реализации в цифровой форме сигнал биений проходит быстрое преобразование Фурье и вычисляется средняя частота спектра. Проведены исследования, показавшие достаточно высокую точность такого метода (форм., рис.). Этим методом я пользовался в своей работе.
В разработанном устройстве сигнал от генератора, пройдя через циркулятор, излучается. В смесителе из излученного и принятого сигналов вырабатывается сигнал биений, который, пройдя через УНЧ и амплитудный ограничитель, переводится в цифровую форму. В МПС цифровые отсчеты сигнала биений проходят преобразование Фурье и вычисляется средняя частота спектра, по ней определяется дальность и результат отображается на индикаторе.
Я рассчитал параметры передатчика и разработал принципиальную схему, реализующую эти структурные блоки. УНЧ и ограничитель выполнены на операционных усилителях. Микропроцессорная система выполнена на микросхеме КР1830ВЕ51. Схема управления индикатором реализована на дешифраторах. Достоинством этой схемы является ее низкая стоимость, обусловленная применением отечественной элементной базы.
Также разработана программа для микропроцессора, выполняющая преобразование Фурье и выдачу оценки дальности. Ее блок-схема представлена здесь.
В конструкторской части представлено размещение микросхем на плате.
В экспериментальной части выполнено моделирование работы НЧ части дальномера. Для этого была разработана соответствующая программа. Моделирование выполнялось для двух значений длительности импульса TI: 102 и 170 отсчетов. Измерения проводились для дальностей порядка 1, 10 и 19 метров с шагом 4 мм. Обрабатывались гармонический и прямоугольный переменный сигналы. Для сравнения точности вычисления оценок расстояний проводились числами, представленными в формате с фиксированной и плавающей точкой.
Результаты эксперимента представлены на этих графиках.
По ним можно сделать вывод, что
1. Использование метода измерения расстояния с помощью ЦАС сглаживает дискретную ошибку;
2. Однако относительное значение сглаживания невелико, поэтому требуется доработка блока НЧ обработки сигнала. При условии сохранения структуры системы в качестве метода доработки можно предложить увеличение длины последовательности БПФ и представление отчетов БПФ с большей разрядностью.
Я закончил (Dixie).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.