При этом для определения того, какое состояние из а - s нужно использовать для передачи текущего полубайта, необходимо учесть, в каком месте подобной повернутой таблицы Грея расположен текущий полубайт. После этого определяется, с каким из состояний а - s совместилось это место повернутой таблицы Грея и исходной таблицы на рис. 20.5, а. Это состояние и используется при амплитудно-фазовой манипуляции в передатчике.
Таким образом, нумеруя квадранты, как показано на рис. 20.17, получаем четыре варианта ориентации кода Грея, показанные на рис. 20.18.
Из них рис. 20.18, а – соответствует положению предыдущего полубайта в I квадранте; рис. 20.18, б - положению предыдущего полубайта в II квадранте; рис. 20.18, в - в III квадранте; рис. 20.18, г - в IV квадранте.
В табл. 20.2 приведено соответствие содержания текущего полубайта и передаваемого при этом амплитудно-фазового состояния в зависимости от того, в какой из квадрантов было расположено амплитудно-фазовое состояние, использованное для передачи предыдущего полубайта.
На приемной стороне производится обратное преобразование. Принятое в текущем такте амплитудно-фазовое состояние сравнивается с тем, которое было принято на предыдущем такте. В зависимости от того, в каком квадранте располагалось предыдущее состояние, используется соответствующий столбец табл. 20.2. На его основе принимаемое в данном такте амплитудно-фазовое состояние идентифицируется с соответствующим вариантом полубайта.
 |
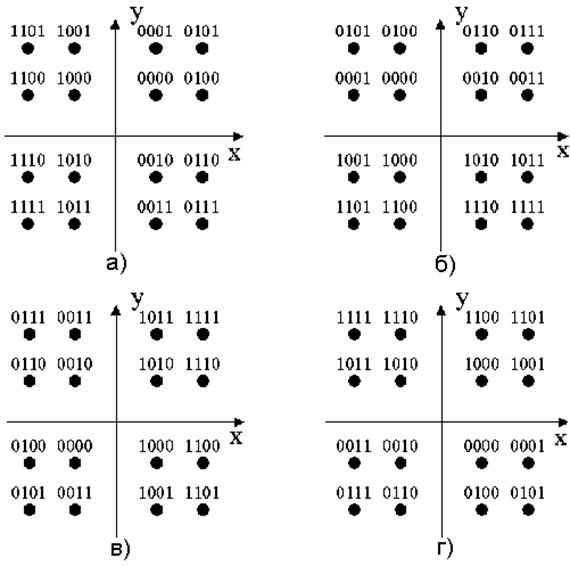
Рис. 20.18. Модификация сигнального созвездия при передаче информации
Таблица 20.2
|
Содержание текущего полубайта |
Квадранты, где было расположено амплитудно-фазовое состояние предыдущего полубайта |
|||
|
I |
II |
III |
IV |
|
|
0000 |
c |
p |
l |
h |
|
0001 |
a |
q |
n |
g |
|
0010 |
p |
l |
h |
c |
|
0011 |
r |
k |
f |
d |
|
0100 |
d |
r |
k |
f |
|
0101 |
b |
s |
m |
e |
|
0110 |
q |
n |
g |
a |
|
0111 |
s |
m |
e |
b |
|
1000 |
h |
c |
p |
l |
|
1001 |
f |
d |
r |
k |
|
1010 |
l |
h |
c |
p |
|
1011 |
n |
g |
a |
q |
|
1100 |
g |
f |
q |
n |
|
1101 |
e |
b |
s |
m |
|
1110 |
k |
f |
d |
r |
|
1111 |
m |
e |
b |
s |
Структурная схема блока идентификации состояний приведена на рис. 20.19. На два входа блока идентификации состояний поступают сигналы I2, Q2. Каждый из них независимо от другого может принимать один из четырех уровней (условно +3, +1, -1, -3). Задачей пороговых устройств (ПУ) является определение того, какой из уровней имеет место в данный момент.
Информация об этом в параллельном двоичном коде с выходов ПУ поступает в дешифратор (ДШ). В нем записана табл. 20.2. Дешифратор состоит из четырех секций. Структура каждой из них соответствует повороту в один из квадрантов. Выбор используемой секции определяется на основе сигналов адресных входов. На них присутствует код с выхода блока памяти (П), в котором хранится информация о том, в каком из квадрантов располагалось амплитудно-фазовое состояние предыдущего полубайта.
Номер этого квадранта определяется в блоке определения квадранта (ОК). Работа элемента памяти тактируется тактовым генератором (ТГ1), который должен вырабатывать импульсы с частотой следования полубайтов.
 |
Рис. 20.19. Блок идентификации состояний
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.