Рассчитаем среднее количество ошибочных битов в такой ситуации. В табл. 20.3 и 20.4 приведено соответствие передаваемых и ложно принятых полубайт (поворот на +900 – табл. 20.3 и поворот на – 900 – табл. 20.4) и количество ошибочных бит в полубайте. Из обеих таблиц ясно, что в среднем повреждается два бита в одном полубайте. Однако вероятность появления ситуаций 1 и 2 различна, поэтому определим её.
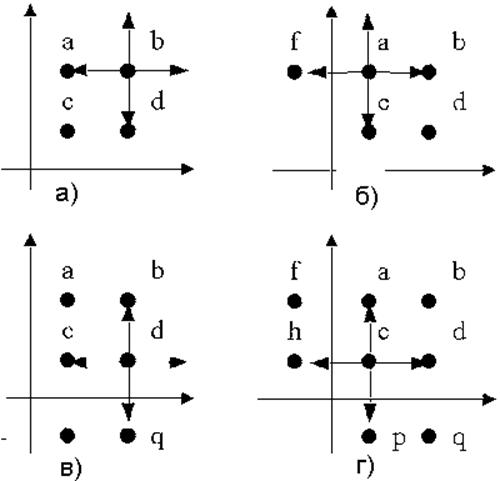
Рис. 20.21. Возможные ошибочные решения приёмника сигналов КАМ-16
Пусть изменение амплитудно-фазового состояния по причине воздействия шума равновероятно во всех четырех направлениях (в каждом p1=1/4). Рассмотрим любой из квадрантов (к примеру, квадрант I на рис. 20.21. Появление ошибки в состояниях a - d равновероятно, т.е. вероятность всех четырех ситуаций, приведенных на рис. 44, а – 44, г одинакова и равна также 1/4. Рассмотрим их по отдельности.
На рис. 20.21, а воздействие шума вообще не приводит к выходу за пределы квадранта. На рис. 20.21, б и 20.21, в выход за пределы квадранта наблюдается в одном случае из четырех. На рис. 20.21, г выход за пределы квадранта наблюдается в двух случаях из четырех.
Таким образом, общая вероятность поворота таблицы равна
 , а
каждый поворот сопровождается средней ошибкой в 2 бита на полубайт.
, а
каждый поворот сопровождается средней ошибкой в 2 бита на полубайт.
|
Переданный полубайт |
Принятый полубайт |
Количество ошибочных бит |
|
0000 |
0010 |
1 |
|
0001 |
0110 |
3 |
|
0010 |
1010 |
1 |
|
0011 |
1110 |
3 |
|
0100 |
0011 |
3 |
|
0101 |
0111 |
1 |
|
0110 |
1011 |
3 |
|
0111 |
1111 |
1 |
|
1000 |
0000 |
1 |
|
1001 |
0100 |
3 |
|
1010 |
1000 |
1 |
|
1011 |
1100 |
3 |
|
1100 |
0001 |
3 |
|
1101 |
0101 |
1 |
|
1110 |
1001 |
3 |
|
1111 |
1101 |
1 |
Отсюда следует, что размножение ошибок из-за применения относительного вида модуляции равно 1,5 (а не 2, как при ОФТ). На самом деле это число будет еще меньше. Мы полагаем, что в первом полубайте из-за появления шума смещение положения амплитудно-фазового состояния в соседнюю позицию приводит (согласно коду Грея) к ошибке в один бит на полубайт. На самом деле эта величина меньше. Вновь рассмотрим рис. 20.21.
Только в ситуации на рис. 20.21, г факт смещения в любом его направление вызовет ошибку. На рис. 20.21, в ошибка будет возникать в трех из четырех случаев смещения (из d в позиции b, c и q). А смещение вправо будет расценено пороговым устройством так же, как позиция d. Это же относится и к ситуации на рисунке 20.21, б.
|
Переданный полубайт |
Принятый полубайт |
Количество ошибочных бит |
|
0000 |
1000 |
1 |
|
0001 |
1100 |
3 |
|
0010 |
1010 |
1 |
|
0011 |
1110 |
3 |
|
0100 |
1001 |
3 |
|
0101 |
1101 |
1 |
|
0110 |
0001 |
3 |
|
0111 |
0101 |
1 |
|
1000 |
1010 |
1 |
|
1001 |
1110 |
3 |
|
1010 |
0010 |
1 |
|
1011 |
0110 |
3 |
|
1100 |
1011 |
3 |
|
1101 |
1111 |
1 |
|
1110 |
0011 |
3 |
|
1111 |
0111 |
1 |
А в ситуации на рисунке 20.21, а ошибка будет возникать только в 2 из 4 случаев смещения (смещение вверх и вправо к ошибочному решению приводить не будет). Таким образом, смещение из-за воздействия шума будет приводить к ошибке с вероятностью
 .
.
То есть в первом поврежденном полубайте будет в среднем теряться не один бит, а 0,75 бита. Таким образом, в рассмотренном способе модуляции КАМ-16 средний коэффициент размножения ошибок составляет 1,25.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.