Рис. 28.Принцип действия РЛС БО с реальной апертурой. Отраженный сигнал используется для модуляции яркости сканирующего луча катодно-лучевсй трубки. Каждая строка развертки с помощью линзы переносится на фотопленку, которая движется со скоростью, пропорциональной скорости движения самолёта.
Основы радиолокации для получения изображений. Большинство применяющихся в дистанционном зондировании радиолокационных систем формирования изображений - это РЛС бокового обзора (РЛС БО). В них используется прямоугольная антенна, расположенная длинной стороной вдоль движения несущей платформы локатора, причем апертура антенны располагается так, что её луч направлен в сторону от платформы. Как следует из (5), ширина луча антенны в некоторой плоскости примерно равна обратной величине размера антенны в этой плоскости, измеренной в длинах волн. Поэтому антенна РЛС БО имеет веерообразный луч (рис. 27) с узкой стороной вдоль движения (по азимуту) и широкой стороной поперек движения (по дальности). В случае отсутствия какой-либо модуляции излучаемого сигнала пространственное разрешение системы просто равняется площади, освещаемой лучом антенны.
Антенны самолётных РЛС БО размещаются на фюзеляже, следовательно, их размеры ограничиваются длиной самолёта. При измерениях с высот полета самолетов это ограничение приводит к тому, что освещаемые площади имеют размеры порядка километров по дальности и десятков метров по азимуту. Хотя спутниковые платформы способны нести антенны большего размера, чем те, что можно разместить на фюзеляже самолёта, гораздо большее расстояние между антенной спутниковой РЛС БО и поверхностью Земли приводит к очень большим размерам освещаемых площадей.
|
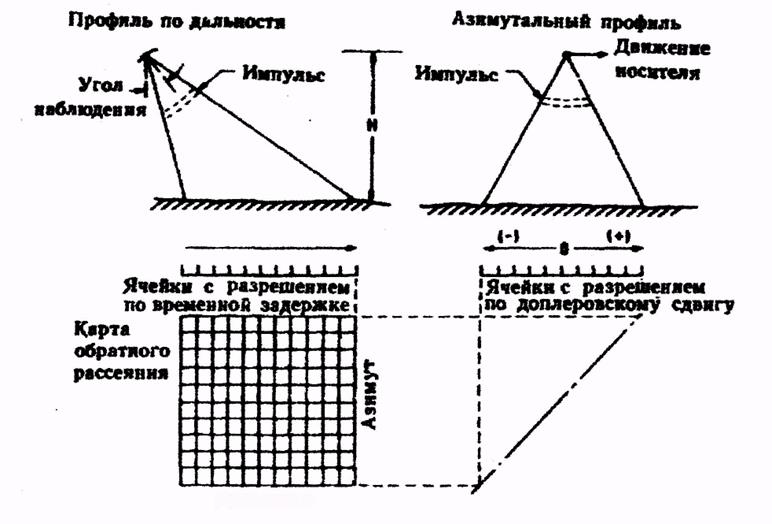
Дальность Рис. 29. Принцип действия радиолокатора с синтезированной апертурой (РСА). Записывается амплитуда и фаза многих импульсов, отраженных от поверхности за время пролета участка, равного по длине элементу азимутального разрешения реальной апертуры. Последующая обработка этих импульсов позволяет получить разрешение по азимуту, равное половине длины реальной апертуры. Проблема повышения разрешения по дальности может быть легко решена посредством излучения коротких импульсов. Для импульса длительностью τ, разрешение по дальности при угле падения θравняется: rp = cτ/2sinθ , где с – скорость света. |
|
|
Локаторы бокового обзора, разрешающая способность которых в азимутальном направлении определяется размером антенны, а по дальности – длительностью зондирующих импульсов, называются РЛС с реальной апертурой. Процесс формирования изображения таким радиолокатором показан на рис. 28.
В дополнение к использованию коротких импульсов, повышающему разрешающую способность локатора по дальности, существует метод получения высокого разрешения и в азимутальном направлении. Он основан на синтезировании длинной антенны вдоль направления движения посредством записи и обработки рассеянной в обратном направлении энергии многих последовательных импульсов. Этот процесс поясняется на рис. 29. Для получения такого разрешения в процессе обработки сигналов должна учитываться фаза рассеянного сигнала в течение времени пролета элемента синтезированной апертуры, длина которого равна элементу азимутального разрешения реальной апертуры. Для "фокусировки" синтезированной апертуры на требуемую наклонную дальность применяется квадратичная коррекция фазы принимаемого сигнала в различных точках этой апертуры. Локаторы с синтезированной апертурой имеют разрешающую способность, недоступную для локаторов с реальной апертурой, но это достигается ценой значительного усложнения как конструкции локатора, так и процесса обработки сигналов.
Оба метода повышения разрешающей способности по дальности и азимуту используются в радиолокаторах с синтезированной апертурой (РСА), азимутальное разрешение которых не зависит от наклонной дальности Rи равняется половине длины антенны:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.