Для активного дистанционного зондирования применяются как радиолокационные системы, дающие возможность получения изображений, так и РЛС, не имеющие средств их формирования. К последним относятся скаттерометры, которые измеряют рассеивающие свойства распределенных целей, и альтиметры, представляющие собой, направленные в надир, РЛС с короткими импульсами, служащие для измерения высоты несущей платформы локатора над земной поверхностью. Скаттерометр обычно измеряет дальность Rдо рассеивающей цели, чтобы по принимаемой мощности PR вычислить коэффициент обратного рассеяния σо (коэффициент обратного рассеяния распределенной по площади цели определяется как удельная эффективная площадь отражения.) Альтиметр почти не отличается от скаттерометра, за исключением того, что его задачей является измерение с максимально возможной точностью R,а не σо.
В качестве введения к описанию радиолокационных систем формирования изображений рассмотрим скаттерометрическую систему, показанную на рис. 26.
Передающий и приёмный блоки присоединены к общей антенне через направленный волновод (циркриггор), который пропускает сигнал только в направлении по часовой стрелке. Главный лепесток диаграммы направленности антенны освещает на поверхности Земли эллипс с осями ra иrp, где индексы а и р означают направления по азимуту и дальности, соответственно.
Величины ra и rp могут быть найдены из ширины главного лепестка диаграммы направленности антенны в азимутальном βa и угломестном βe направлениях и дальности R:
ra = βa ·R
rp = R [sin(θ + βe/2 ) – sin(θ – βe/2)
где θ - угол наблюдения, соответствующий дальности R.
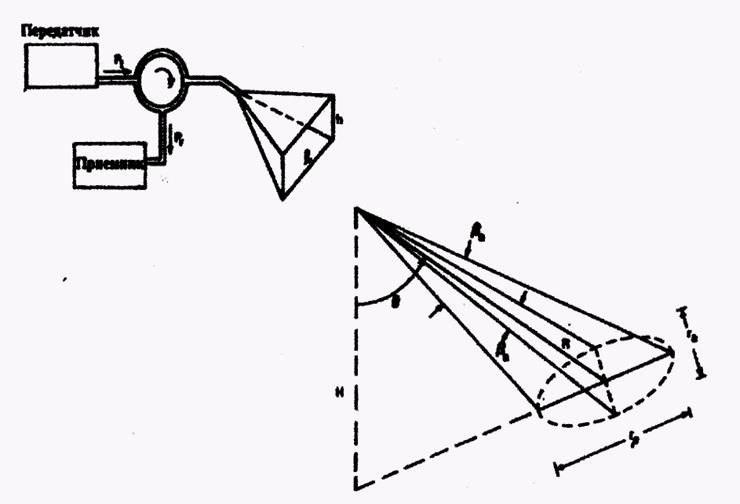
Рис. 26. Простая скаттерометрическая система, освещающая с высоты Н эллиптический участок земной поверхности.
Азимутальная ширина луча определяется соотношением:
βa=K λ/l где К - коэффициент освещения антенны, обычно меняющийся в пределах от 0.5 до 2; l - ширина раскрыва антенны. Аналогичное выражение связывает βес высотой раскрыва h. В общем случае мощность Рt, излучаемая в направлении цели, связана с принимаемой рассеянной в обратном направлении мощностью Рrинтегральным уравнением радиолокации. Если значения ширины диаграммы направленности βе и βa, малы (каждая менее нескольких градусов), может использоваться следующая приближенная форма уравнения радиолокации:
, 
где G - коэффициент усиления антенны; λ - длина волны: σоvh= σоrt -коэффициент обратного рассеяния поверхности при её облучении (t-поляризованной волной и приёме излучения r-поляризованной антенной).
Локаторы, предназначенные для дистанционного зондирования, обычно работают в одном (или нескольких) из следующих поляризационных режимов: НН, VV или режиме кросс-поляризации. В режиме НН передающая и приёмная антенны поляризованы горизонтально, а в режиме VV – вертикально. В режиме кросс-поляризации (НV или VН) одна из антенн поляризована горизонтально, а другая вертикально. Коэффициенты обратного рассеяния, соответствующие этим режимам обозначаются: σоhh, σоvv и σоhv (теорема взаимности гласит, что σоhv = σоvh ) .
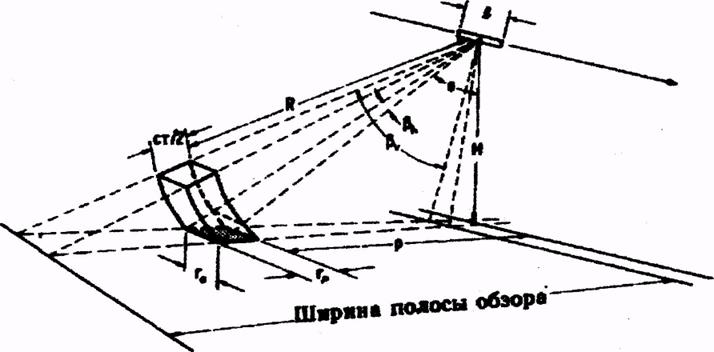
Рис. 27. Геометрия наблюдения поверхности Земли РЛС БО с реальной апертурой. Показан элемент разрешения (rрх rа)на поверхности.
Величины, стоящие в квадратных скобках в правой части уравнения радиолокации, являются или параметрами системы, или параметрами распространения радиоволн. Следовательно, они не имеют прямой связи с рассеивающими свойствами облучаемой поверхности. Другими словами, неодинаковая яркость соседних элементов радиолокационного изображения полностью объясняется неодинаковыми коэффициентами рассеяния соответствующих элементов земной поверхности. Если локатор прокалиброван по абсолютной шкале, он может синтезировать изображения по значениям σ°. Связь между σrt°(θ) (в) и физическими свойствами участков и объёмов земной поверхности обсуждается ниже.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.