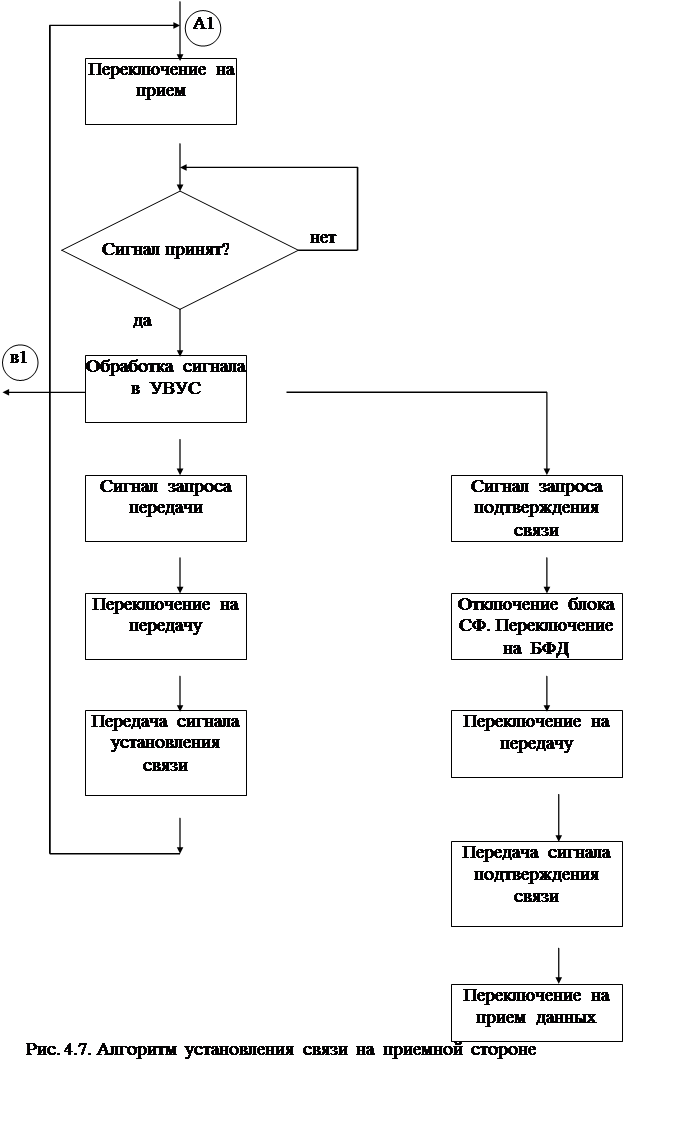
При успешном приеме сигнала № 2 табл. 4.1, УЗД в ответ выдает сигнал запроса подтверждения связи, означающий, что запрашивающая сторона готова принимать данные. Для этого УВУС совместно с КУ и ФКП формирует код сигнала запроса подтверждения связи (сигнал № 3, табл. 4.1) и осуществляет его передачу (т. 3, рис. 4.4). В ответ на этот сигнал, в случае благоприятной помеховой ситуации, УВД выдает сигнал подтверждения связи (сигнал № 4, табл. 4.1). В случае успешного приема сигнала подтверждения связи (т. 4, рис. 4.4), происходит выключение таймера УЗД (т. 5, рис. 4.4) и спустя некоторое время Т2, подбираемое опытным путем, УЗД синхронно с УВД перейдут в режим приема и передачи данных соответственно. В этом случае с УВД будет передаваться поток данных, УЗД будет осуществлять прием и обработку этих данных. Строго синхронная работа этих схем необходимо для нормального функционирования согласованных фильтров.
В случае, если любой из ответных сигналов был принят с ошибкой, включается режим обработки ошибочных ситуаций (т. 6, рис. 4.4). В этой ситуации УВУС вырабатывает сигнал ошибки (т. 1, рис. 4.5).
Одновременно с ним вырабатывается сигнал запроса в БКПО, входящий в ФКП. По сигналу ошибки, поступающему с УВУС, ФКП совместно с КУ формирует сигнал ошибочного приема (сигнал № 5, табл. 4.1), который излучается передатчиком.
Блок контроля помеховой обстановки вырабатывает все необходимые условия (т. 2, рис. 4.5), требующиеся для смены кодовой последовательности
модулирующих сигналов. В этом режиме ФКП осуществляет синтез кодовой последовательности, свойства которой минимально подвержены влиянию действующих помех. После передачи сигнала ошибки как в УЗД, так и в УВД происходит синхронная смена кода модулирующей последовательности
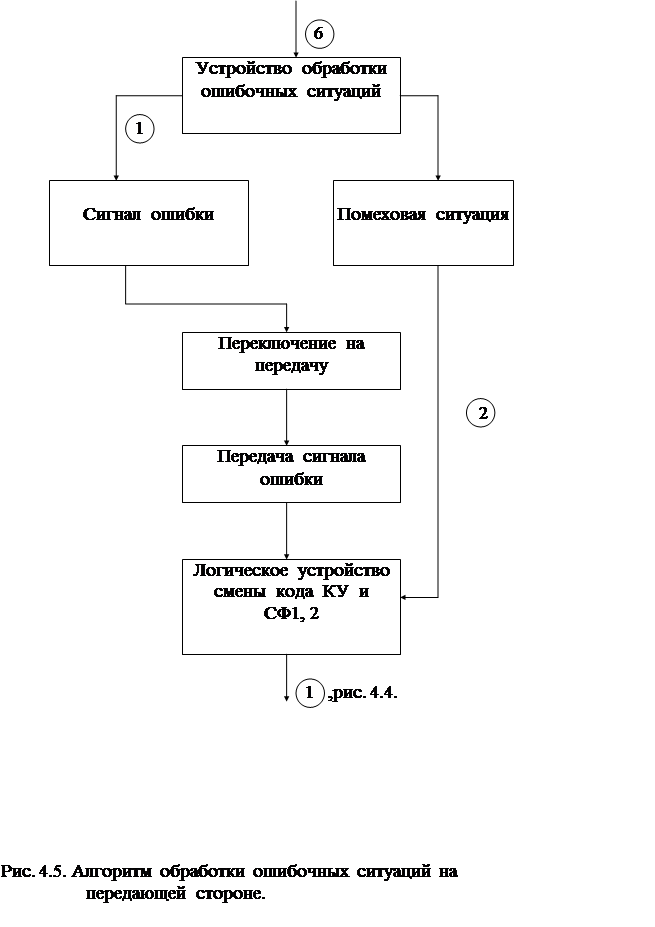
Данная последовательность используется как для кодирования сигналов управления, так и для кодирования собственно передаваемых данных. После смены кода описанная выше процедура повторяется снова до факта установления надежной связи.
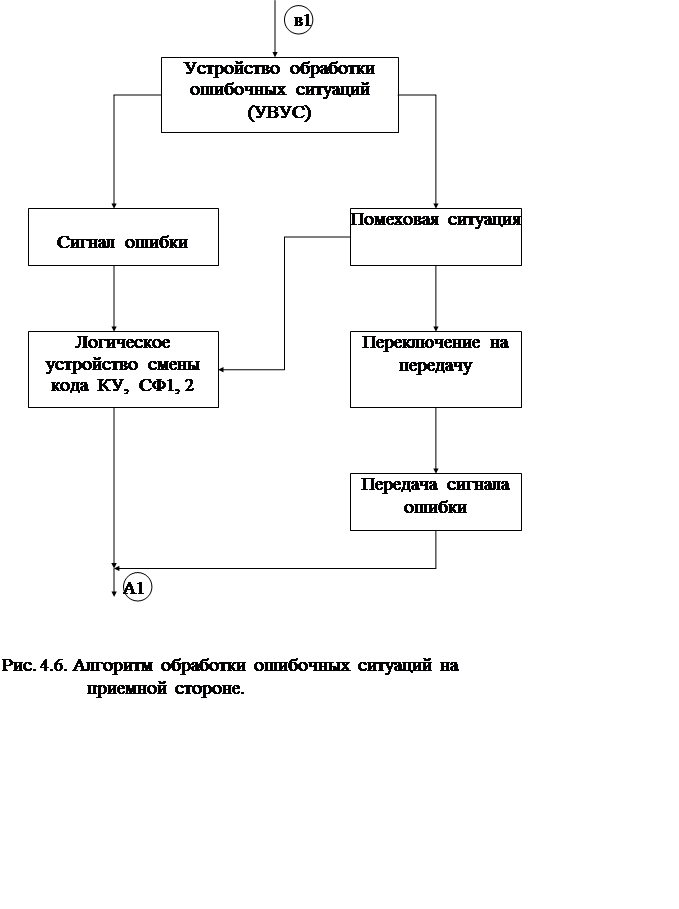
Структура алгоритма функционирования УВД аналогична рассмотренной выше. Необходимые иллюстрации, поясняющие работу УВД в обычном режиме и при обработке ошибочных ситуаций, представлены на рис. 4.6 и 4.7 соответственно.
 |
Функциональная схема устройства изображена на рис. 5.1. Схема включает в себя следующие блоки.
1. Центральный процессор (ЦП). Роль ЦП будет выполнять однокристальный процессор обработки сигналов типа ADSP2111 (фирма Analog Devices) DD1 (на рис. 5.2). Краткие технические характеристики процессора приведены в Приложении 3.
Время выполнения одного командного цикла данного МП составляет 20 нс. Оценим возможности быстродействия МП. При скорости передачи информации с МПС v=2 Мбит/с, время, отводимое на прием каждого информационного символа, будет составлять, соответственно, Т = N/v » 32 мкс. Это соответствует 25-ти командам МП и скорости работы последовательного порта RS 232 порядка vдоп= 32 Кбит/с. Следовательно, оставшееся время МП целесообразно использовать для выполнения других функций. Таким образом, имеется возможность совмещения в одном ЦП функций ФКП и основных функций МПС: согласованная фильтрация (блоки СФ1 и СФ2 рис. 4.1) и кодирование (блок КУ рис. 4.1).
2. Блок памяти, включающий ОЗУ (микросхема (МС) К537РУ16А, емкость 8 КБайт) и ПЗУ (МС К573РФ4, емкость 8 КБайт). Т.к. МП имеет три различные шины: адреса, данных и команд, т.е. МП построен по модифицированной гарвардской архитектуре, то для его нормальной работы необходимо предусмотреть раздельные ОЗУ данных и ОЗУ команд. Кроме того, во внутренней структуре используемого МП отсутствует ПЗУ программ. Следовательно, необходимо предусмотреть наличие внешнего ПЗУ (на рис. 5.2.). Длина слова, выдаваемого по шине команд, составляет 24 бита, что приводит к необходимости использования трех 8-ми разрядных МС памяти (К537РУ16А´3) (на рис. 5.2 DD5-DD7). Длина слова, выдаваемого МП по шине данных, составляет 16 бит. В этом случае требуется использование двух МС
ОЗУ выбранного ранее типа (на рис 5.2 DD3, DD4).
3. Порты ввода-вывода (на схеме DD9-DD16, DD17; МС 1533ЛЕ4, ЛН1, ЛА3, ЛР8); необходимы для обеспечения приема-передачи информации между МП и внешними устройствами. В качестве внешних устройств в данном случае выступают ПК, передатчик, блок управления режимом (рис. 4.1).
По запросу от внешних устройств и различным другим командам МП через порты ввода-вывода осуществляет выдачу необходимых сигналов управления согласно алгоритму работы МПС (рис. 4.4 - 4.7). Дешифрацию соответствующих портов ввода-вывода производит 16-ти разрядный дешифратор адреса (на схеме DD8).
4. Блок СФ сигналов управления. Согласно (табл. 4.1) в устройстве предусматриваются 5 управляющих сигналов длиной Nу=8. Данный блок осуществляет согласованную фильтрацию каждого из этих сигналов. Согласованные фильтры для каждого сигнала работают независимо друг от друга. Данное устройство выполнено на МС DD16 (К1533ЛЕ4), DD18 (К1533Р8), DD19-DD21 (К1533ЛН1) и DD23-DD27 (К1533ЛА2).
В качестве примера рассмотрим на рис. 5.2 вариант реализации СФ для сигнала №1 (табл. 4.1). Схема состоит из логических элементов DD16.1, DD16.2, осуществляющих функцию дешифрации приема данных рассматриваемого СФ. С выхода 6 МС DD16.2 на сдвиговый регистр DD18 подается последовательность тактовых импульсов, вырабатываемых МП на линии D14 шины данных. Кодовая последовательность, соответствующая сигналу управления, в последовательном виде поступает через МС DD16.1 на вход 2 сдвигового регистра. Основная функция сдвигового регистра - преобразование кода входной последовательности в параллельный вид. К выходам сдвигового регистра в соответствии с кодом обрабатываемой последовательности, подключаются инвертирующие логические элементы (DD19.1 - DD19.4). В результате подобного подключения на входах сумматора (DD23) будет присутствовать логическая 1 (при условии, что на входе согласованного фильтра имеется данная кодовая комбинация). Сигнал с выхода сумматора, соответствующий решению о наличии команды №1 (табл. 4.1), поступает через порт ввода (DD9.1, DD12.1) на 9 линию (D9, шина данных МП). Чтение данных по этому порту стробируется управляющим сигналом Y9 дешифратора адреса DD8.
Рассмотрим вопрос о способе приема информации МПС от ПК. В общем случае прием и передачу информации достаточно просто реализовать посредством обращения ПК к соответствующим портам ввода/вывода. Это достаточно эффективный способ, однако он требует определенных затрат времени на дешифрацию и, собственно, на запись или чтение данных порта. Другой, значительно более эффективный, способ взаимодействия ПК с МПС, заключается в использовании внутренних последовательных портов ввода/вывода МП. Предельная скорость передачи одного бита информации по этим портам обратно пропорциональна длительности командного цикла МП (20 нс) и составляет 50 Мбит/с.
С учетом сделанных ранее расчетов, скорость передачи информации первого последовательного порта МП должна составлять vдоп=32 Кбит/с. Посредством этого порта осуществляется обмен данными с МПС. Сигналы управления ПС и различные тестовые сигналы с ПК поступают на МПС через порты ввода/вывода ПК (на принципиальной схеме этот способ взаимодействия не отражен).
Информация с МПС выводится посредством обращения к портам вывода. В схеме предусматривается 2 подобных порта: на линии D13 (порт С4) и на линии D12 (порт С3) шины данных МП.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.