порядок дифференциального уравнения, описывающего систему.
Определим передаточную функцию динамического звена по 1 и используя данные
k=2, n=2, m=1 :

Передаточная функция разомкнутой системы определяется 3:

При анализе замкнутой системы полагаем, что помеха отсутствует. Тогда схема будет выглядеть:
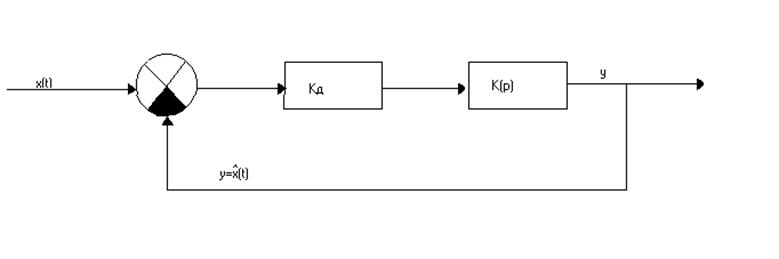
Рис.2.
Используя правила преобразования для последовательного и встречно – параллельного звеньев выведем передаточную функцию замкнутой системы:

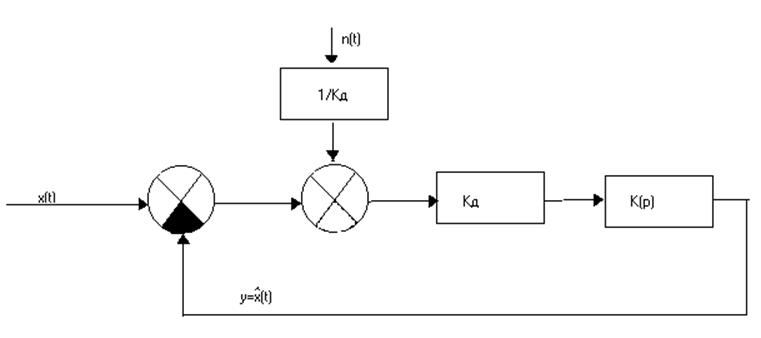
Для определения спектральной плотности эквивалентных флуктуаций, приведённых ко входу дискриминатора используем правило переноса сумматора с выхода на вход звена и вычислим по формуле 5:
Найдём спектральную плотность эквивалентных флуктуаций:

2.Оптимизация параметров системы
Оптимизация системы по критериюминимума среднего квадрата ошибки сводится к нахождению значения параметра Кu, при котором обеспечивается минимум величины:
![]() 5а где
5а где ![]() -
динамическая ошибка, определяемая инерционностью системы;
-
динамическая ошибка, определяемая инерционностью системы;
![]() -
дисперсия шумовой ошибки, определяемая помехой n(t).
-
дисперсия шумовой ошибки, определяемая помехой n(t).
Порядок астатизма рассматриваемой системы равен 2, поэтому динамическая ошибка
определяется параметром ![]() (в дальнейшем будем обозначать
(в дальнейшем будем обозначать ![]() ) задающего воздействия 6:
) задающего воздействия 6:
где ![]() =
= ![]()
Реальный шум имеет ограниченную ширину спектра, однако она во много раз превышает полосу пропускания системы, что позволяет в качестве шума использовать модель белого шума. Дисперсия шумовой ошибки определяется по формуле 7:
где
Формула 8 определяет шумовую полосу следящей системы.
![]() - АЧХ
замкнутой системы.
- АЧХ
замкнутой системы.
Передаточная функция звена, определяющего динамические свойства системы, имеет вид:

Тогда передаточная функция замкнутой системы, имеет вид:

Заменив параметр p на jw, получаем выражение для комплексного коэффициента передачи замкнутой системы:

Для квадрата модуля комплексного коэффициента передачи(квадрат АЧХ системы) запишем:


Сравнивая выражения 12 и 13, получаем для коэффициентов полиномов:
Значение интеграла 8,при n=2 вычислим исходя из значения коэффициентов полиномов:

Тогда шумовая полоса системы и дисперсия шумовой ошибки:
Динамическая ошибка определяется параметрами ![]() и
и ![]() задающего
воздействия, а также порядком астатизма системы и добротностью
задающего
воздействия, а также порядком астатизма системы и добротностью ![]() . В нашем случае порядок равен 2, поэтому
можно записать:
. В нашем случае порядок равен 2, поэтому
можно записать:

Для нахождения оптимального значения параметра Кu продифференцируем выражение
5а для среднего квадрата ошибки и при равняем её к нулю:
Выражаем Ku:

Зависимости ошибок слежения от полосы пропускания системы выражаются ниже приведёнными формулами, а график приведен на рис.3:
Рис.3. Графики функций ошибок слежения.
Физический смысл
существования оптимального значения полосы Fш объясняется следующим образом. При малых
значениях Fш основной вклад в
результирующую ошибку вносит ![]() , а при больших Fш - шумовая составляющая еn рис.3. Поэтому существует
оптимальное значение шумовой полосы Fш
opt, при котором результирующая ошибка минимальна.
, а при больших Fш - шумовая составляющая еn рис.3. Поэтому существует
оптимальное значение шумовой полосы Fш
opt, при котором результирующая ошибка минимальна.
3. Определение запасов устойчивости системы.
Для определения АЧХ и ФЧХ разомкнутой системы представим динамическое звено в виде последовательно соединенных двух интегрирующих и одного форсирующего звеньев.

ЛАХ будет определяться суммой логарифмических АЧХ и ФЧХ отдельных звеньев.
ЛАХ интегрирующих звеньев определяется как:

ЛАХ форсирующего звена:
где ![]() частота сопряжения.
частота сопряжения.
Следовательно, суммарная:
![]()
ЛФХ звена:
Графики приведены на рис.4:
Рис.4. ЛАХ и ЛФХ системы.
ЛАХ пересекает ось абсцисс с наклоном -20 дБ, значит, перерегулирование
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




