Министерство образования Российской Федерации
Красноярский Государственный
Технический Университет
Кафедра Радиосистем
КУРСОВАЯ РАБОТА
СИСТЕМА СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ
Пояснительная записка
Выполнил:
Студент группы Р28-1
Проверил:
Преподаватель
Красноярск
2001г.
ЗАДАНИЕ
по курсовому проектированию
1. Тема курсовой работы: Система слежения за задержкой (ССЗ)
2. Срок сдачи законченной работы: 15.05.01 г.
3. Исходные данные к работе:
 а) Номер варианта:– №6
а) Номер варианта:– №6
б) Параметры
задающего воздействия -  ,
,  ;
;
в) Спектральная
плотность шума -  ;
;
г) Коэффициент
передачи дискриминатора -  ;
;
д) Параметры
динамического звена: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
е) Область применения – цифровой следящий измеритель дальности некогерентной импульсной РЛС (сложный ЛЧМ сигнал).
4. Содержание расчетно–пояснительной записки:
1) Передаточные функции разомкнутой и замкнутой системы.2
2) Оптимизация следящей системы.3
3) Построение ЛАХ, ЛФХ и определение запаса устойчивости.7
4) Цифровое моделирование системы.12
5) Составление функциональной схемы.15
Список используемых сокращений.17
Вывод.18
Список используемой литературы.20
 1.Передаточные
функции разомкнутой и замкнутой системы.
1.Передаточные
функции разомкнутой и замкнутой системы.
Имеется структурная схема следящей системы рис.1.
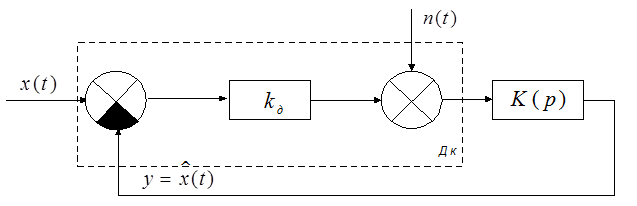
Рис.1 Структурная схема следящей системы
Передаточная функция звена будет
равна:  .
.
Тогда передаточная функция
разомкнутой системы:  .
.
Передаточная функция замкнутой
системы: 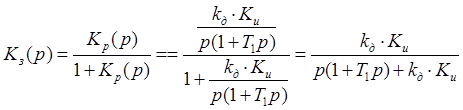
.Для того чтобы определить
спектральную плотность ![]() эквивалентных флуктуаций,
приведенных ко входу дискриминатора воспользуемся правилом преобразования
структурных схем (перенос сумматора с выхода на вход звена).
эквивалентных флуктуаций,
приведенных ко входу дискриминатора воспользуемся правилом преобразования
структурных схем (перенос сумматора с выхода на вход звена).
Получим преобразованную структурную схему рис.2.
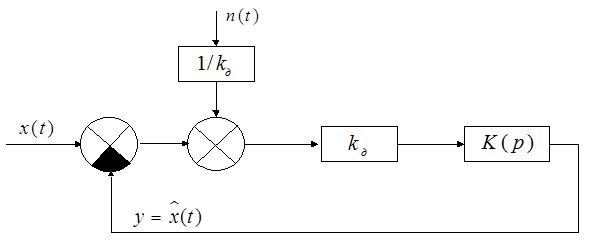
Рис.2 Преобразованная структурная схема следящей системы.
Тогда спектральная
плотность эквивалентного шума будет равна: 
2. Оптимизация следящей системы.
Передаточная функция звена,
определяющего динамические свойства системы, имеет вид: .
Передаточная функция замкнутой системы:
 , где
, где ![]() - добротность системы по скорости.
- добротность системы по скорости.
Проведем оптимизацию системы по
критерию минимума среднего квадрата ошибки. Найдем такое значение параметра ![]() , при котором обеспечивается минимум
величины
, при котором обеспечивается минимум
величины ![]() . Составляющая
. Составляющая ![]() определяет
динамическую ошибку, обусловленную инерционностью системы, а составляющая
определяет
динамическую ошибку, обусловленную инерционностью системы, а составляющая ![]() определяет дисперсию шумовой ошибки,
обусловленной помехой
определяет дисперсию шумовой ошибки,
обусловленной помехой ![]() .
.
Динамическая
ошибка ![]() определяется параметрами
определяется параметрами ![]() и
и ![]() задающего
воздействия, а так же порядком астатизма и добротностью
задающего
воздействия, а так же порядком астатизма и добротностью ![]() системы.
системы.
В нашем случае, для
рассматриваемой системы 1-го порядка, порядок астатизма равен 1 (к=1), тогда динамическая
ошибка определяется как:  , где
, где
![]() 1 с ' - добротность системы по
скорости.
1 с ' - добротность системы по
скорости.
Случайная составляющая ошибки определяется
статистическими характеристиками помехи ![]() и
структурой (параметрами) системы. Так как мы будем использовать
в качестве
и
структурой (параметрами) системы. Так как мы будем использовать
в качестве ![]() модель белого шума с
равномерной спектральной плотностью в полосе частот от 0 до ¥, тогда дисперсию шумовой
ошибки можно рассчитать по формуле:
модель белого шума с
равномерной спектральной плотностью в полосе частот от 0 до ¥, тогда дисперсию шумовой
ошибки можно рассчитать по формуле: , где
, где  - шумовая полоса
- шумовая полоса
следящей
системы в Гц,, ![]() - АЧХ замкнутой системы.
- АЧХ замкнутой системы.
Определим шумовую полосу рассматриваемой
системы.
Передаточная
функция замкнутой системы:;
Заменим
в формуле параметр ![]() , получим выражение для
комплексного коэффициента передачи замкнутой системы:
, получим выражение для
комплексного коэффициента передачи замкнутой системы: ,
,
Тогда для квадрата модуля комплексного коэффициента
передачи (квадрат АЧХ) запишем:  .
.
Вычисление интеграла шумовой полосы упрощается, если представить подынтегральное выражение в виде:
 , где полиномы
, где полиномы
![]() ,
,
![]() ,
,
n – порядок дифференциального уравнения, описывающего систему.
Для исследуемой системы n=2,тогда
![]()
![]()
Приравнивая соответствующие коэффициенты, находим:
![]()
![]()
![]()
![]()
![]()
Тогда нахождение шумовой полосы
системы и дисперсии шумовой ошибки сводится к вычислению интеграла  , т.к. у нас n=2, тогда получим
, т.к. у нас n=2, тогда получим 
 Шумовая
полоса системы:
Шумовая
полоса системы: ![]() ,
,
Дисперсия
шумовой ошибки: ![]()
 .
.
Произведем оптимизацию системы.
Для нахождения экстремума
среднего квадрата ошибки, продифференцируем выражение для среднего квадрата
ошибки ![]() по параметру
по параметру ![]() и
приравняем производную нулю:
и
приравняем производную нулю:
 , где:
, где:
 ,
,  ,
,  ,
,
 .
.
Подставляя эти значения, получим уравнение:
Откуда выражаем оптимальное значение
параметра ![]() :
:
![]()
 ,
,  ,
,  .
.
Подставляя численные значения, получим:
 .
.
Найдем
оптимальные значения шумовой полосы следящей системы, а так же дисперсию
шумовой ошибки и динамическую ошибку, при ![]() :
:
![]()
 ,
,
![]()
![]() ,
,
![]()
 ;
; ![]() .
.
Найдем значение минимально достижимой ошибки
слежения:
![]() ,
,
![]() .
.
Физический смысл существования оптимального значения полосы
![]() можно объяснить так. При малых значениях
можно объяснить так. При малых значениях ![]() основной вклад в результирующую ошибку
основной вклад в результирующую ошибку ![]() вносит составляющая
вносит составляющая ![]() , а при больших
, а при больших ![]() -
шумовая составляющая
-
шумовая составляющая ![]() . Поэтому существует оптимальное
значение шумовой полосы
. Поэтому существует оптимальное
значение шумовой полосы ![]() , при котором
результирующая ошибка минимальна.
, при котором
результирующая ошибка минимальна.
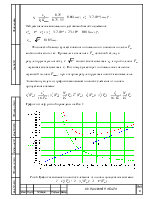
Это можно увидеть из графиков зависимости ошибок слежения от полосы пропускания системы:
 ;
;  ;
;  .
.
Графики этих функций приведены на Рис. 1:
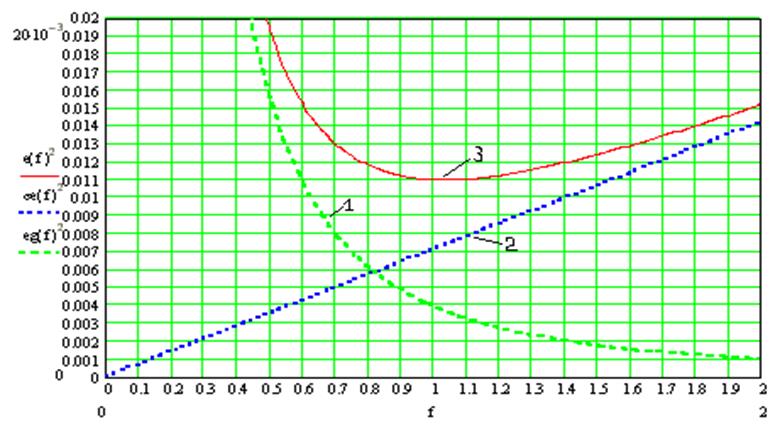
Рис.3. График зависимости ошибок слежения от полосы пропускания системы:
1 -- ![]() ; 2 --
; 2 -- ![]() ; 3 --
; 3 -- ![]() .
.
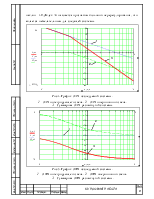
 3. Определение запасов устойчивости
следящей системы.
3. Определение запасов устойчивости
следящей системы.
Определим запас устойчивости системы, используя метод логарифмических частотных характеристик, суть которого сводится к построению ЛАХ и ЛФХ разомкнутой следящей системы.
Так как передаточная функция разомкнутой следящей системы равна
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.