












Федеральное государственное автономное образовательное учреждение высшего профессионального образования
«СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
Институт инженерной физики и радиоэлектроники
Кафедра «Радиотехники»
Курсовой проект
«Система автоматической подстройки частоты»
Пояснительная записка
Вариант №14
Проверил преподаватель: _________________
Разработал студент гр. РФ09−16: _________________
Красноярск 2012г.
СОДЕРЖАНИЕ
ОБЩИЕ УКАЗАНИЯ.. 3
 ИСХОДНЫЕ ДАННЫЕ. 4
ИСХОДНЫЕ ДАННЫЕ. 4
ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ………………..……………..5
ОПТИМИЗАЦИЯ СЛЕДЯЩЕЙ СИСТЕМЫ……………………………………6
ЛАХ И ЛФХ СИСТЕМЫ.. 10
АЧХ ЗАМКНУТОЙ СИСТЕМЫ………………………………………………..12
МОДЕЛИРОВАНИЕ СЛЕДЯЩЕЙ СИСТЕМЫ………………………...…….13
ФУНКЦИОНАЛЬНАЯ СХЕМА СИСТЕМЫ АПЧ……………………………16
ЗАКЛЮЧЕНИЕ. 21
БИБЛИОГРАФИЧЕСКИЙ СПИСОК.. 22
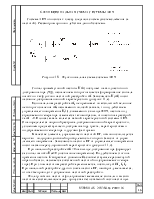
Обобщенная структурная схема линейной непрерывной следящей системы 2-го порядка астатизма имеет вид, представленный на рисунке 1:

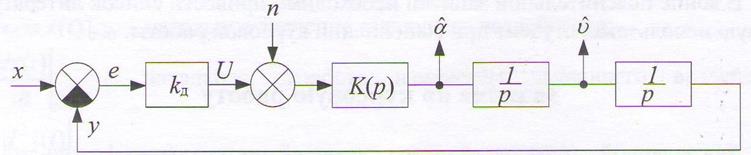
Рисунок 1 – Структурная схема следящей системы , ![]()
Задающее воздействие определяется полиноминальной моделью
где
![]() – начальное значение задающего
воздействия;
– начальное значение задающего
воздействия;
![]() – начальная скорость изменения
задающего воздействия;
– начальная скорость изменения
задающего воздействия;
![]() – начальное ускорение.
– начальное ускорение.
Физический смысл и размерность параметров задающего воздействия определяются типом следящей системы.
Помеха ![]() считается белым шумом со
спектральной плотностью
считается белым шумом со
спектральной плотностью ![]() , имеющей размерность Вт/Гц.
, имеющей размерность Вт/Гц.
Передаточная функция динамического звена описывается выражением
где ![]() – общий коэффициент передачи типовых
звеньев;
– общий коэффициент передачи типовых
звеньев; ![]() – постоянные времени форсирующего и
инерционных звеньев.
– постоянные времени форсирующего и
инерционных звеньев.
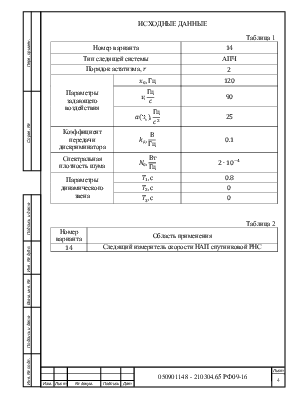
 ИСХОДНЫЕ
ДАННЫЕ
ИСХОДНЫЕ
ДАННЫЕТаблица 1
|
Номер варианта |
|
|
|
Тип следящей системы |
АПЧ |
|
|
Порядок астатизма, |
|
|
|
Параметры задающего воздействия |
|
|
|
|
|
|
|
|
|
|
|
Коэффициент передачи дискриминатора |
|
|
|
Спектральная плотность шума |
|
|
|
Параметры динамического звена |
|
|
|
|
|
|
|
|
|
|
Таблица 2
|
Номер варианта |
Область применения |
|
|
Следящий измеритель скорости НАП спутниковой РНС |
1. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНОЙ ФУНКЦИИ
 Для
спектральной плотности эквивалентного шума nэ(t), приведенного ко входу дискриминатора (вход элемента
сравнения), используя правила преобразования структурных схем (перенос
сумматора с выхода на вход звена) можно записать:
Для
спектральной плотности эквивалентного шума nэ(t), приведенного ко входу дискриминатора (вход элемента
сравнения), используя правила преобразования структурных схем (перенос
сумматора с выхода на вход звена) можно записать:
![]() [
[![]() ] (1.1)
] (1.1)
![]()
![]()
Передаточная функция динамического звена определяется выражением:
 (1.2)
(1.2)
В нашем случае: 
Передаточная функция разомкнутой системы:
![]() (1.3)
(1.3)
Определим передаточную функцию замкнутой системы,
предварительно обозначив ![]() :
:
 (1.4)
(1.4)
Подставим в (1.4) результат (1.2):
 (1.5)
(1.5)
2. ОПТИМИЗАЦИЯ СЛЕДЯЩЕЙ СИСТЕМЫ
 Оптимизация
системы по критерию минимума среднего квадрата ошибки сводится к нахождению
значения параметра Kи ,
при котором обеспечивается минимум величины
Оптимизация
системы по критерию минимума среднего квадрата ошибки сводится к нахождению
значения параметра Kи ,
при котором обеспечивается минимум величины
![]() , [Гц2] (2.1)
, [Гц2] (2.1)
где ![]() - составляющая,
которая определяет динамическую ошибку, обусловленную инерционностью следящей
системы по отношению к меняющемуся задающему воздействию
- составляющая,
которая определяет динамическую ошибку, обусловленную инерционностью следящей
системы по отношению к меняющемуся задающему воздействию
![]() - определяет
дисперсию ошибки
- определяет
дисперсию ошибки ![]() , обусловленную помехой n(t).
, обусловленную помехой n(t).
Следовательно, (2.1) определяет средний квадрат результирующей ошибки
![]() .
.
Динамическая ошибка ![]() определяется
параметрами
определяется
параметрами ![]() и
и ![]() задающего
воздействия, а также порядком астатизма (числом интеграторов) и добротностью
задающего
воздействия, а также порядком астатизма (числом интеграторов) и добротностью ![]() системы. Для системы 2-го порядка
установившаяся ошибка равна:
системы. Для системы 2-го порядка
установившаяся ошибка равна:
 , [Гц] (2.2)
, [Гц] (2.2)
где K[c-2]- добротность системы по ускорению (k=2)
Случайная составляющая еn(t) ошибки определяется статистическими характеристиками помехи (а также параметрами) системы. В качестве n(t) используем модель белого шума с равномерной в полосе частот от 0 до ∞ спектральной плотностью (хотя реальный шум имеет ограниченную ширину спектра, однако она во много раз превышает полосу пропускания системы Fш , что позволяет использовать модель белого шума). Исходя из этого дисперсию шумовой ошибки рассчитаем по формуле:
 , [Гц] (2.3)
, [Гц] (2.3)
где
 (2.4)
(2.4)
шумовая полоса следящей системы в Гц; ![]() - АЧХ замкнутой системы.
- АЧХ замкнутой системы.
Для нахождения экстремума среднего квадрата ошибки необходимо продифференцировать выражение (2.1) по параметру Ки и приравнять производную нулю:
 (2.5)
(2.5)
 Для
вычисления интеграла (2.4) представим подинтегральное выражение в виде
Для
вычисления интеграла (2.4) представим подинтегральное выражение в виде
 , (2.6) где полиномы
, (2.6) где полиномы
![]() (2.7)
(2.7)
![]()
n- порядок дифференциального уравнения, описывающего систему.
Нахождение шумовой полосы системы и дисперсии шумовой ошибки сводится к вычислению интеграла:
 , (2.8)
, (2.8)
значение которого при n=2
 (2.9)
(2.9)
Заменим в выражении (1.5) параметр p на jω:
 (2.10)
(2.10)
Представим данное выражение в виде (2.6):
 , (2.11)
, (2.11)
отсюда,
![]()
![]()
В соответствии с (2.7): a0=1; a1=KT; a2=K
b0=-K2T2; b1=K2;
Подставим полученные коэффициенты в (2.9):

 Найдем
шумовую полосу:
Найдем
шумовую полосу:
 (2.12)
(2.12)
 , [Гц]
(2.12а)
, [Гц]
(2.12а)
Дисперсия шумовой ошибки:
 [Гц2] (2.13)
[Гц2] (2.13)
 (2.14)
(2.14)
Подставим (2.2) и (2.14) в (2.5):
 (2.15)
(2.15)
Выполнив математические преобразования, получим:
 (2.16)
(2.16)
![]()
Зная величину Kиopt рассчитаем по формуле (2.12а) оптимальное значение шумовой полосы Fшoptсистемы и по формуле (2.1) минимально достижимую ошибку слежения emin.
 , Гц
, Гц
![]() [Гц2]
[Гц2]

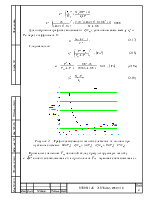
 Для
построения графика зависимости
Для
построения графика зависимости ![]() , установим
связь между
, установим
связь между ![]() и
и ![]() через
коэффициент К:
через
коэффициент К:
 , (2.17)
, (2.17)
Следовательно
 , [Гц2] (2.18)
, [Гц2] (2.18)
 , [Гц] (2.18а)
, [Гц] (2.18а)
 (2.19)
(2.19)
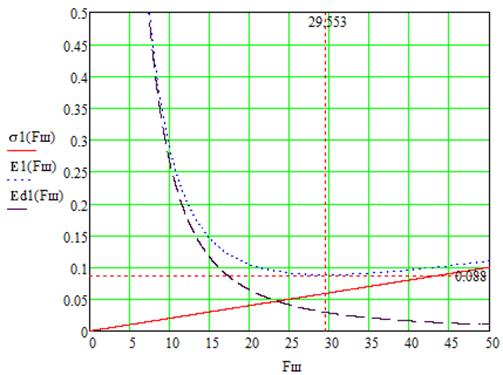
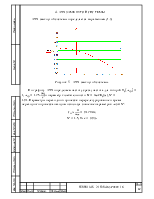
Рисунок 2. – График
зависимости ошибок слежения от полосы про- пускания
системы: ![]() –
–![]() ,
, ![]() –
–![]() ,
, ![]() –
–![]() .
.
При малых значениях Fш основной вклад в результирующую ошибку ![]() вносит составляющая ед ,
а при больших Fш– шумовая составляющая еn .
вносит составляющая ед ,
а при больших Fш– шумовая составляющая еn .
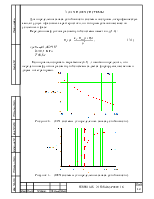
3. ЛАХ И ЛФХ СИСТЕМЫ
 Для определения запаса устойчивости системы
построим логарифмическую амплитудную и фазовою характеристики, по которым
установим запас по усилению и фазе.
Для определения запаса устойчивости системы
построим логарифмическую амплитудную и фазовою характеристики, по которым
установим запас по усилению и фазе.
Передаточная функция разомкнутой системы имеет вид (1.3):
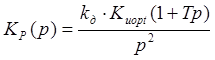 ,
(3.1)
,
(3.1)
где Киopt=1,462*103
kд =0,1 В/Гц
T=0,8 c
Если проанализировать выражение (3.1) , то можно определить, что передаточная функция разомкнутой системы задается форсирующим звеном и двумя интеграторами.
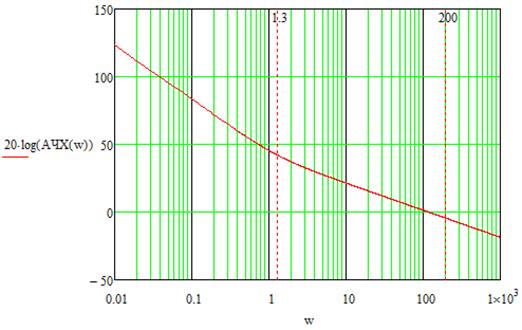
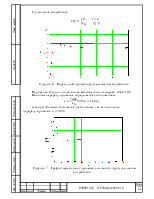
Рисунок 3. – ЛАХ системы (к определению запаса устойчивости).
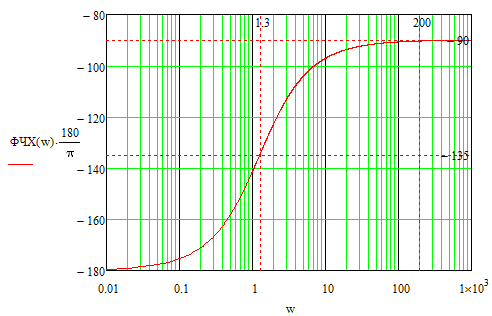
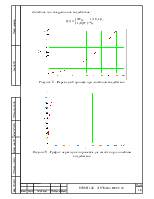
Рисунок 4. – ЛФХ системы (к определению запаса устойчивости).
 Запас по фазе определяется как:
Запас по фазе определяется как:
![]() (3.2)
(3.2)
Из графиков (рисунок 3 и рисунок 4) видно, что запас по фазе составляет Δφ≈π/2.
Запас по амплитуде (усилению) численно равен значению ЛАХ на критической частоте (частоте, на которой ЛФХ равна –π рад).
В нашем случае, запас по усилению (ΔL) не имеет смысла определять (теоретически он бесконечен, поскольку ЛФХ достигает –π рад лишь в асимптотической точке ω → 0). Считаем, что система является устойчивой (так как полученные
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


