Содержание
Задание на курсовой проект…………………………………………………………………
1.Разработка функциональной схемы электропривода………
2.Разработка алгоритмов регулирования……………………………………
3.Разработка принципиальной схемы………………………………………………
4.Разработка программного обеспечения……………………………………
Задание на курсовой проект.
Разработать микропроцессорное управляющее устройство для регулирования вентильного электропривода:
1. Разработать функциональную схему электропривода.
2. Разработать математическую модель контуров регулирования и рассчитать параметры регулятора.
3. Разработать принципиальную схему микропроцессорного управляющего устройства с необходимыми интерфейсами.
4. Разработать блок-схему программного обеспечения и программу в машинных кодах.
Исходные данные.
1. Тип электропривода: вентильный двигатель (СД).
2. Вид обратной связи по скорости: ОС по ЭДС с датчиком ЭДС.
3. Тип датчика тока: датчик среднего тока.
4. Микропроцессорный комплект: К1810.
5. Вид обмена: по прерыванию.
6. Элементная база СИФУ: 1810ВИ54.
7. Элементная база АЦП: 1108ПВ2.
8. Элементная база ОЗУ: 1500.
9. Элементная база ПЗУ: 573.
10. Метод аппроксимации: Симпсона.
1.Разработка функциональной схемы электропривода.
В соответствии с исходными данными составляется функциональная схема замкнутой системы электропривода.
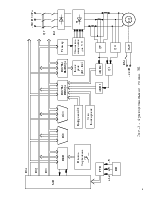
Нереверсивный электропривод с синхронным двигателем M1 управляется от тиристорного преобразователя. Преобразователь подключается к силовой цепи с помощью автоматического выключателя QF и контактора КЛ. Торможение осуществляется с помощью электромеханического тормоза КМ.
Замкнутая система управления строиться по принципу подчиненного регулирования и выполняется двухконтурной – с внутренним контуром тока и внешним контуром скорости. Датчик тока можно выполнить на трансформаторе тока ТА с трехфазным мостовым выпрямителем. Датчик скорости косвенный – по ЭДС двигателя. Сигналы датчиков вводятся в систему управления через аналого-цифровые преобразователи АЦП и порты. А сигнал задания на скорость вводится с цифрового ЗС идущий через порт.
ПЧ управляется импульсами формирование которых производится от системы регулирования через таймер и порт.
Управление контактной аппаратурой осуществляется так же с помощью порта, на выход которого подключены катушки контакторов КЛ и КМ.
Контроль состояния контактов КЛ и КМ, а также наличия импульсов управления на выходе таймера осуществляется с помощью порта контроля блокировок.
Вычислительное устройство реализуется на базе микропроцессорного комплекта К1810. Кроме микропроцессора К1810ВМ86 в него входят тактовый генератор, синхронизирующий работу системы, формирователи шин (буферные регистры), необходимые для формирования системной магистрали (шин данных (ША), адреса (ША) и управления (ШУ)) и контроллер прерываний, позволяющий организовать обработку сигналов органов управления (кнопок «Пуск» и «Стоп»).
Программа, реализующая алгоритм регулирования и осуществляющая управление и диагностику состояния привода, размещается в оперативном запоминающем устройстве (ОЗУ). Там же располагаются переменные программы, входные, выходные и промежуточные значения сигналов регуляторов. Константы располагаются в постоянном запоминающем устройстве (ПЗУ).
Функциональная схема системы электропривода изображена на рисунке
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.