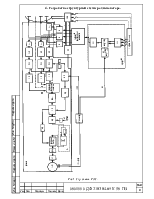
увеличения чувствительности приемника на входе предусматривается малошумящий УВЧ. Линейные УПЧ используют при когерентной обработке.
С выхода УПЧ сигналы поступают на АД или ФД. При когерентной обработке используется ФД, а при некогерентной - АД.
Выходной сигнал ФД поступает в ЧПК. Видеоимпульсы АД поступают в некогерентный накопитель, например, на индикатор, построенный на основе ЭЛТ.
ЧПК предназначен для наблюдения сигналов пассивных помех (отражений от земной и морской поверхности, местных предметов, облака дипольных отражателей и т.п.), когда они обычным способом не обнаруживаются. Для этого используется отличие доплеровской частоты сигнала цели от доплеровской частоты сигнала пассивной помехи за счет разных скоростей (радиальных) перемещения цели и пассивной помехи относительно РЛС.
Индикаторное кругового обзора предназначен для отображения выходных сигналов приемника и выполняется, как правило, на основе ЭЛТ, на экране которой отображается воздушная обстановка в зоне действия РЛС.
Синхронизатор обеспечивает согласование всех устройств РЛС во времени, задает начало отсчета времени при измерении дальности, определяет начало и конец работы отдельных устройств путем формирования соответствующих импульсов запуска и остановки. Синхронизатор определяет частоту (период следования или частоту повторения) зондирующих импульсов.
Помимо названных устройств, в состав РЛС входят множество ее основных трактов и систем (система электропитания, система вентиляции и охлаждения, система контроля, устройства защиты от перегрузок и т.д.).
5. Рассчитать требуемую мощность передатчика. Выбрать генераторный прибор.
При расчете требуемой мощности передатчика следует исходить из формулы:
 , где
, где ![]() - энергия зондирующего сигнала,
- энергия зондирующего сигнала, ![]() - эффективная поверхность рассеяния,
- эффективная поверхность рассеяния,
![]() -
суммарный коэффициент различимости. (воспользовавшись кривыми обнаружения (рис.
6.1,рис. 6.2, рис. 6.3) ‘П1’.
-
суммарный коэффициент различимости. (воспользовавшись кривыми обнаружения (рис.
6.1,рис. 6.2, рис. 6.3) ‘П1’.

![]()
Энергия зондирующего сигнала

Энергия зондирующего сигнала связана с импульсной мощностью соотношением:
![]() ,
,
![]() -
импульсная мощность, выразим и получим
-
импульсная мощность, выразим и получим
где
![]() – коэффициент, учитывающий не
прямоугольность пачки;
– коэффициент, учитывающий не
прямоугольность пачки;
![]() - импульсная мощность;
- импульсная мощность;
![]() - длительность импульса;
- длительность импульса;
![]() - число импульсов в пачке.
- число импульсов в пачке.
Рекомендуется
выбрать ![]() .
.
В качестве генераторного прибора выбран многорезонаторный магнетрон, (на основе [3])
его значение коэффициента полезного действия (КПД)- КПД до80%.
6. Произвести прикидочный расчет потребляемой от сети мощности (мощности агрегатов питания).
По импульсной мощности можно определить мощность, потребляемую выходным каскадом радиопередающего устройства РЛС от агрегатов питания:
 (17)
(17)
где  – скважность сигнала,
– скважность сигнала,
![]() =0.8– КПД генераторного
прибора,
=0.8– КПД генераторного
прибора,
![]() =0.8– КПД модулятора (
=0.8– КПД модулятора (![]() )
)
![]() =0.9– КПД выпрямителя (
=0.9– КПД выпрямителя (![]() );
);
![]() =0.8– КПД
трансформатора (
=0.8– КПД
трансформатора (![]() ).
).
Найдем скважность
Определим потребляемую мощность на выходе.
Если в качестве выходного каскада выбран прибор с малым коэффициентом усиления, то необходимо учесть и мощность, потребляемую предвыходным каскадом. С учетом сказанного.
![]()
![]()
Кроме мощности, потребляемой передатчиком, приведем расчет мощности, потребляемой другими элементами РЛС: приемником, индикатором, системой передачи радиолокационной информации, двигателем, приводящим в действие механизм перемещения антенны, системой опознавания.
![]()
Питание РЛС осуществляется от собственной электростанции (ДЭС) или от внешней трехфазной сети 220 В 50 Гц. Мощность, потребляемая РЛС от сети
50 Гц, составляет 50 кВт, от сети 400 Гц – 25 кВт.
Элементная база станции содержит в своем составе как электровакуумные приборы с применением навесных элементов и объемного монтажа, так и твердотельные элементы – модули и микромодули в сочетании с монтажом на основе печатных плат.
7. Определить уменьшение дальности действия РЛС при: тумане с видимостью 150 м, 60м, 30м;дожде с интенсивностью 1мм/час, 4мм/час, 16мм/час.
Для определения уменьшения дальности действия РЛС в реальной атмосфере необходимо определить величину потерь, возникающих при распространении радиоволн – β, дБ/км. Определение величины β производится по графикам (приложение 2, рис. 7.2.). По величине β можно определить дальность действия РЛС, пользуясь графиками (рис. 7.2) ‘П2’.
Притумане с видимостью 150 м и λ=0.11м.
Β= 0дБ/км.
Притумане с видимостью 60 м и λ=0.11м.
Β= 0дБ/км.
Притумане с видимостью 30 м и λ=0.11м.
Β= 0.013дБ/км.
При дожде с интенсивностью 1мм/час и λ=0.11м.
Β= 0дБ/км.
При дожде с интенсивностью 4мм/час и λ=0.11м.
Β= 0дБ/км.
При дожде с интенсивностью 16мм/час и λ=0.11м.
Β= 0дБ/км.
8.Разработка программы на алгоритмическом языке.
Составить
программу на алгоритмическом языке для вычисления дальности действия РЛС при
наличии на расстоянии ![]() км от РЛС полосы
метеообразований с заданным затуханием и шириной.
км от РЛС полосы
метеообразований с заданным затуханием и шириной.
Схема алгоритма решения представлена в ‘П3’
Разработка будет произведена в пакте MatLab 7.
Программа
function
clc
r0=450;
r1=90;
r2=70;
B1=0;
B2=0.01;
B3=5.7e-3;
ra2=0;
ra1=r0;
ra=0;
k=0;
t=0;
while k<0.5
r3=ra1-r1-r2;
if r3>=0 ra2=r0*10^(-0.05*(r1*B1+r2*B2+r3*B3));
else r3=ra1-r1;
if r3>0 ra2=r0*10^(-0.05*(r1*B1+r2*B2));
else ra2=r0*10^(-0.05*(ra1*B1));
end
end
z=ra1-ra2
if abs(z)<4 k=1;
else k=0;
end
ra1=ra2;
t=t+1;
end
t;
ra=ra2
Результат
z = -38.5749
z = 12.4378
z = -3.9736
ra =376.8992
Вывод:
Разработанная схема Трехкоординатного импульсного радиолокатор с разработочной схемы защиты от пассивных помех , с данными характеристиками может быть реализована. На основе современной технически генерирования приема и обработки сигналов.
Разработанный радио локатор имеет примерные характеристики:
1.
![]()
2. ![]()
3. ![]()
4. ![]()
5. ![]()
6. ![]() .
.
7. Величину потерь в реальной атмосфере, возникающих при распространении радиоволн незначительна при λ=0.11м.
Конструкция антенной системы не вызовет затруднения ее реализации
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.