Исследование объекта управления.
Цель работы: построение кривой разгона и определение его статических и динамических характеристик.
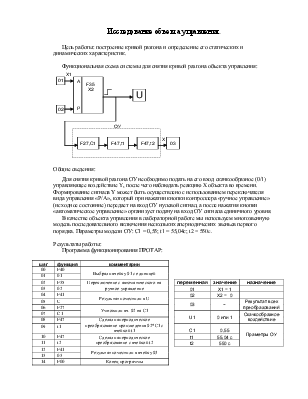
Функциональная схема системы для снятия кривой разгона объекта управления:
Общие сведения:
Для снятия кривой разгона ОУ необходимо подать на его вход скачкообразное (0/1) управляющее воздействие Y, после чего наблюдать реакцию X объекта во времени. Формирование сигнала Y может быть осуществлено с использованием переключателя вида управления «Р/А», который при нажатии кнопки контроллера «ручное управление» (исходное состояние) передает на вход ОУ нулевой сигнал, а после нажатия кнопки «автоматическое управление» организует подачу на вход ОУ сигнала единичного уровня.
В качестве объекта управления в лабораторной работе мы используем многозвенную модель последовательного включения нескольких апериодических звеньев первого порядка. Параметры модели ОУ: С1 = 0,55; t1 = 55,04c; t2 = 550c.
Результаты работы:
Программа функционирования ПРОТАР:
|
шаг |
функция |
комментарии |
||||
|
00 |
F40 |
Выбрали ячейку 01 с единицей |
||||
|
01 |
01 |
|||||
|
02 |
F35 |
Переключение с автоматического на ручное управление |
переменная |
значение |
назначение |
|
|
03 |
02 |
01 |
X1 = 1 |
|||
|
04 |
F41 |
Результат поместили в U |
02 |
X2 = 0 |
||
|
05 |
U |
03 |
~ |
Результат всех преобразований |
||
|
06 |
F27 |
Умножили яч. 02 на С1 |
||||
|
07 |
C1 |
U1 |
0 или 1 |
Скачкообразное воздействие |
||
|
08 |
F47 |
Сделали апериодическое преобразование произведения 02*C1 с ячейкой t1 |
||||
|
09 |
t1 |
C1 |
0,55 |
Праметры ОУ |
||
|
10 |
F47 |
Сделали апериодическое преобразование с ячейкой t2 |
t1 |
55,04 c |
||
|
11 |
t2 |
t2 |
550 c |
|||
|
12 |
F41 |
Результат поместили в ячейку 03 |
||||
|
13 |
03 |
|||||
|
14 |
F00 |
Конец программы |
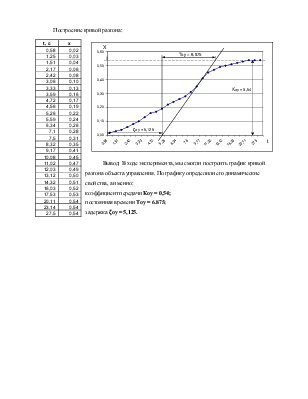
Построение кривой разгона:
|
t, c |
x |
|
0,58 |
0,02 |
|
1,25 |
0,03 |
|
1,51 |
0,04 |
|
2,17 |
0,06 |
|
2,42 |
0,08 |
|
3,06 |
0,10 |
|
3,33 |
0,13 |
|
3,59 |
0,16 |
|
4,72 |
0,17 |
|
4,56 |
0,19 |
|
5,26 |
0,22 |
|
5,59 |
0,24 |
|
6,34 |
0,26 |
|
7,1 |
0,28 |
|
7,5 |
0,31 |
|
8,32 |
0,35 |
|
9,17 |
0,41 |
|
10,08 |
0,45 |
|
11,02 |
0,47 |
|
12,03 |
0,49 |
|
13,12 |
0,50 |
|
14,32 |
0,51 |
|
16,03 |
0,52 |
|
17,53 |
0,53 |
|
20,11 |
0,54 |
|
23,14 |
0,54 |
|
27,5 |
0,54 |
Вывод: В ходе эксперимента, мы смогли построить график кривой разгона объекта управления. По графику определили его динамические свойства, а именно: коэффициент передачи Коу = 0,54; постоянная времени Тоу = 6.875; задержка ζоу = 5,125.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.