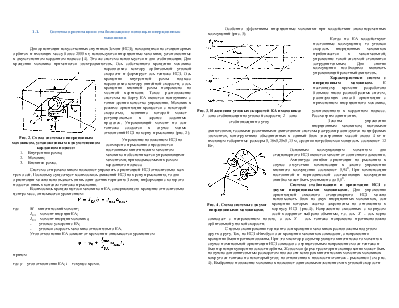
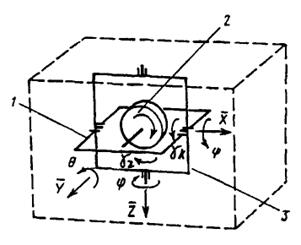
 Для ориентации искусственных спутников Земли (ИСЗ),
находящихся на стационарных орбитах и имеющих массу более 2000 кг,
используются инерционные маховики, установленные в двухстепенном карданном
подвесе [4]. Эта же система используется и для стабилизации. Для вращения
маховика применяется электродвигатель. Ось собственного вращения маховика
параллельна вектору орбитальной угловой скорости и формирует ось тангажа ИСЗ.
Ось вращения внутренней рамы подвеса параллельна вектору линейной скорости, а
ось вращения внешней рамы направлена по местной вертикали. Такое расположение
системы на борту КА является наилучшим с точки зрения качества управления.
Маховик в режиме ориентации вращается с некоторой скоростью, величина которой
может регулироваться в заранее заданных пределах. Управляющий момент по оси
тангажа создается в случае малых отклонений ИСЗ по керну и рысканию (рис. 2).
Для ориентации искусственных спутников Земли (ИСЗ),
находящихся на стационарных орбитах и имеющих массу более 2000 кг,
используются инерционные маховики, установленные в двухстепенном карданном
подвесе [4]. Эта же система используется и для стабилизации. Для вращения
маховика применяется электродвигатель. Ось собственного вращения маховика
параллельна вектору орбитальной угловой скорости и формирует ось тангажа ИСЗ.
Ось вращения внутренней рамы подвеса параллельна вектору линейной скорости, а
ось вращения внешней рамы направлена по местной вертикали. Такое расположение
системы на борту КА является наилучшим с точки зрения качества управления.
Маховик в режиме ориентации вращается с некоторой скоростью, величина которой
может регулироваться в заранее заданных пределах. Управляющий момент по оси
тангажа создается в случае малых отклонений ИСЗ по керну и рысканию (рис. 2).
Управление положением ИСЗ по осям крена и рыскания определяется постоянным кинетическим моментом маховика и обеспечивается управляющими моментами, прикладываемыми к рамам карданного подвеса.
Система с гиромаховиком позволяет управлять ориентацией ИСЗ относительно всех трех осей. Поскольку существует взаимосвязь движений ИСЗ по крену и рысканию, то для ориентации можно использовать лишь один датчик горизонта Земли, информация с которого подается лишь к каналам тангажа и рыскания.
Взаимосвязь вращающегося маховика и КА, совершающего вращение относительно центра масс, описывается уравнением:
![]()
![]()
где M– кинетический момент;
JКА – момент инерции КА;
JКА – момент инерции маховика;
- угловое ускорение КА;
- угловая скорость маховика относительно КА.
Угол отклонения КА зависит от времени и описывается уравнением
причем где φ – угол отклонения КА; t– текущее время.
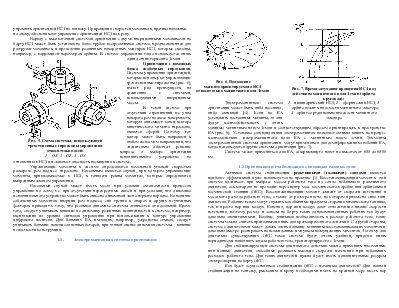
Особенно эффективны инерционные маховики при воздействии знакопеременных возмущений (рис. 3).
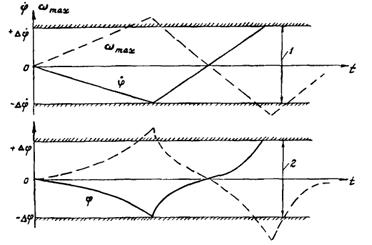 Когда
на КА воздействуют постоянные возмущения, то угловая скорость инерционных
маховиков приближается к максимальной, управление такой системой становится
затруднительным. Для снятия возмущения необходимо включать управляющий ракетный
двигатель.
Когда
на КА воздействуют постоянные возмущения, то угловая скорость инерционных
маховиков приближается к максимальной, управление такой системой становится
затруднительным. Для снятия возмущения необходимо включать управляющий ракетный
двигатель.
Характеристики систем с инерционным маховиком. К настоящему времени разработано большое число разнообразных систем, реализующих способ ориентации с применением инерционного маховика, установленного в карданном подвесе. Рассмотрим один из них.
Законы управления инерционным маховиком, шаговыми двигателями, газовыми реактивными двигателями системы разгрузки реализуются на цифровых элементах, конструктивно объединенных в единый блок электроники массой около 4 кг и имеющем габаритные размеры 0,16х0,20х0,13 м, средняя потребляемая мощность составляет 12 Вт.
 Основным
возмущающим моментом для стационарного ИСЗ является момент от солнечного
давления.
Основным
возмущающим моментом для стационарного ИСЗ является момент от солнечного
давления.
Амплитуда ошибки ориентации по рысканию в случае отсутствия компенсации в законе управления внешнего возмущения составляет 0,940. При компенсации постоянной и периодической составляющих возмущения ошибка может быть уменьшена до 0,50.
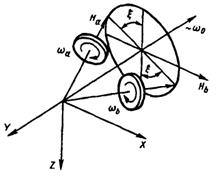
Система стабилизации и ориентации ИСЗ с двумя инерционными маховиками. Для управления ориентацией сквозного стационарного ИСЗ можно использовать блок из двух инерционных маховиков, оси вращения которых жестко закреплены по отношению к корпусу ИСЗ (рис.4). Направление связанных с корпусом осей координат выбрано обычным
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.