Из существующих электроприводов механизмов раскрытия практическое применение нашли приводы с двигателями постоянного тока (колекторные и безколекторные), переменного тока, импульсные шаговые двигатели и др.
При выборе электромеханического привода руководствуются следующим алгоритмом:
1. выясняется характер работы двигателя (регулируемый или нет);
2. определяется назначение привода;
3. режим работы (длительный, кратковременный, повторный кратковременный);
4. характеристики привода (продолжительность работы, частота пусков, частота остановов, наличие реверсов);
5. значение номинального и пускового моментов;
6. нестабильность скорости привода;
7. момент инерции привода;
8. напряжение привода и частота для двигателей переменного тока;
9. рабочие параметры (давление, температура).
Порядок выбора двигателя
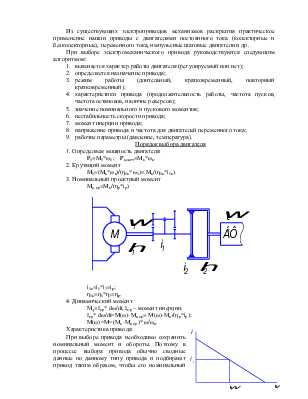
1. Определяем мощность двигателя:
P1=M1*ω1; Pконеч=Mк*ωк.
2. Крутящий момент
M1=(Mк*ωк)/(η1к*ω1)= Mк/(η1к*i1к).
3. Номинальный проектный момент
Mн пр=Mн/(ηр*iр)
i1к=i1*i2=ip;
η1к=η1*η2=ηp.
4. Динамический момент
Мд=Iпр* dω/dt, Iпр – момент инерции.
Iпр* dω/dt=М(ω)-Мн пр= М(ω)-Мн/(ηр*iр);
М(ω)=М=(Мп-Мн пр)* ω/ωн.
 Характеристика привода:
Характеристика привода:
При выборе привода необходимо сохранить номинальный момент и обороты. Поэтому в процессе выбора привода обычно сводные данные по данному типу привода и подбирают привод таким образом, чтобы его номинальный момент был равен или больше потребного, а динамический позволял компенсировать моменты инерции редуктора и раскрываемой СБ. При этом должны выполнятся параметры по рабочей температуре, напряжению питания и остальным показателям.
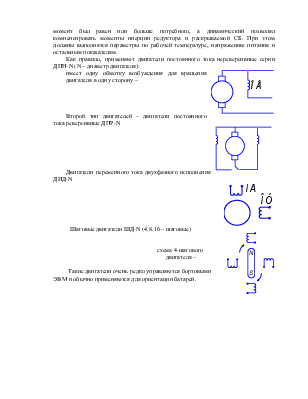
Как правило, применяют двигатели постоянного тока нереверсивные серии ДПН-N (N – диаметр двигателя):
 имеет
одну обмотку возбуждения для вращения двигателя в одну сторону –
имеет
одну обмотку возбуждения для вращения двигателя в одну сторону –
 Второй
тип двигателей – двигатели постоянного тока реверсивные ДПР-N
Второй
тип двигателей – двигатели постоянного тока реверсивные ДПР-N
Двигатели переменного тока двухфазного исполнения ДИД-N
Шаговые двигатели ШД-N (4,8,16 – шаговые)
схема 4-шагового
двигателя –
Такие двигатели очень редко управляются бортовыми ЭВМ и обычно применяются для ориентации батарей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.