Построение и исследование линейных систем автоматического регулирования.
Цель: исследование свойств линейных систем аналогового и импульсного регулирования в процессе их наладки.
На практике широкое применение нашли следующие методы наладки:
1. Экспериментально - аналитический метод (методика Капеловича)
2. Метод Никольса и Циглера
Суть методики Капеловича:
• экспериментальным путем снимают кривую разгона, и по ней определяют параметры ОУ: Kоу, Tоу, ζоу
• выбирается закон регулирования и для него по эмпирическим формулам вычисляются параметры настройки регулятора
Крпи = 0,6/C – где С = Kоу * ζоу/ Tоу
T рпи = 0,6 * Tоу
• устанавливают рассчитанные параметры настройки и проводят экспериментпо снятию настройки, при внесении сложнообразного внешнего возмущения
• по графику определяют показатели качества регулирования, при улучшении качества регулирования уточняют качества регулирования.
Суть метода Циглера и Никольса:
• выбирают П регулятор.
• плавно увеличивая коэффициент передачи регулятора. Выводят систему автоматического регулирования на границу устойчивости.
• запоминают значение Крпкр при котором автоколебания получены и по графику переходного процесса определяют период автоколебаний.
• выбирают нужный закон регулирования и для него рассчитывают параметры настройки, чтобы отодвинуться от границы устойчивости системы.
Крпи = 0,35 * Крпкр
T рпи = 1,25 * Тx
• устанавливают расчитанные параметры настройки. Проводят эксперимент и по графику определяют показатели качества регулирования.
• в случае необходимости уточняют параметры настройки
Результаты работы:
Структурная схема модели исследуемой системы:
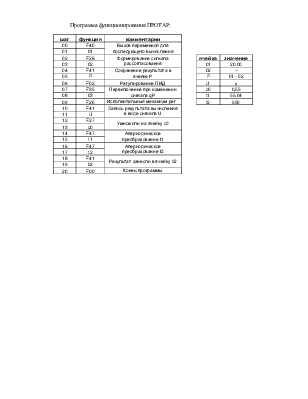
Программа функционирования ПРОТАР:
|
шаг |
функция |
комментарии |
|||
|
00 |
F40 |
Вызов переменной для последующего вычисления |
|||
|
01 |
01 |
||||
|
02 |
F26 |
Формирование сигнала рассогласования |
ячейка |
значение |
|
|
03 |
02 |
01 |
20.00 |
||
|
04 |
F41 |
Сохранение результата в ячейке P |
02 |
~ |
|
|
05 |
P |
P |
01 - 02 |
||
|
06 |
F02 |
Регулирование ПИД |
U |
y |
|
|
07 |
F35 |
Переключение при изменении сигнала qP |
c0 |
0,55 |
|
|
08 |
03 |
t1 |
55,04 |
||
|
09 |
F20 |
Исполнительный механизм рег |
t2 |
550 |
|
|
10 |
F41 |
Запись результата вычисления в виде сигнала U |
|||
|
11 |
U |
||||
|
12 |
F27 |
Умножили на ячейку с0 |
|||
|
13 |
c0 |
||||
|
14 |
F47 |
Апериодическое преобразование t1 |
|||
|
15 |
t1 |
||||
|
16 |
F47 |
Апериодическое преобразование t2 |
|||
|
17 |
t2 |
||||
|
18 |
F41 |
Результат занесли в ячейку 02 |
|||
|
19 |
02 |
||||
|
20 |
F00 |
Конец программы |
Опыт 1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.