







возможных проблем с памятью во время работы загруженного приложения.
Следующие пределы применяются к максимально возможному числу входов/выходов, в зависимости от систем.
|
Система |
Макс кол-во входов |
Макс кол-во выходов |
Число правил |
|
SIMATIC S7-300 |
8 |
4 |
200 |
|
SIMATIC S7-400 |
8 |
4 |
2000 |
|
WinCC |
8 |
4 |
2000 |
Применение встроенных и созданных исследователем отношений позволяет интерпретировать полученные результаты в исходных терминах. Готовые к использованию графические режимы облегчат визуализацию стратегий освобождения от нечеткости, нечетких множеств и нечетких отношений.
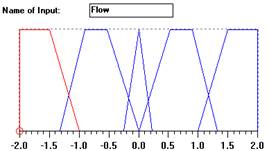
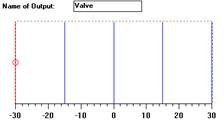
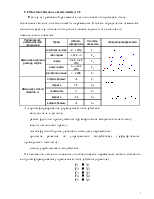
Исходя из требований регламента технологического процесса, была составлена таблица лингвистических переменных. Область определения изменения величины расхода и степени открытия клапана заданы в отклонениях от номинального значения.
|
Наименование лингвистической переменной |
Термы |
Область определения |
Нечеткое множество |
Функции принадлежности |
|
Изменение величины расхода, м куб/с |
значительно ниже |
-2…-1 кПа |
F1 |
|
|
ниже нормы |
-1,325…-0 |
F2 |
||
|
норма |
-0,25…0,25 кПа |
F3 |
||
|
выше нормы |
0…-1,325 кПа |
F4 |
||
|
значительно выше |
1…2 кПа |
F5 |
||
|
Изменение степени открытия, % |
открыть больше |
15 |
X1 |
|
|
открыть |
7,5 |
X2 |
||
|
не изменять |
0 |
X3 |
||
|
закрыть |
-7,5 |
X4 |
||
|
закрыть больше |
15 |
X5 |
Алгоритм формирования управляющего воздействия:
-ввод сигнала с датчика;
-расчет функции принадлежности (фазификация-введение в нечеткость);
-анализ истинности правил;
-оценка функций принадлежности выходных переменных;
-принятие решения об управляющих воздействиях (дефазификация-приведение к четкости);
- вывод управляющего воздействия.
На основании таблицы описания лингвистических переменных можно составить алгоритм формирования управляющего воздействия (правила):
F1 à X1
F2 à X2
F3 à X3
F4 à X4
F5 à X5
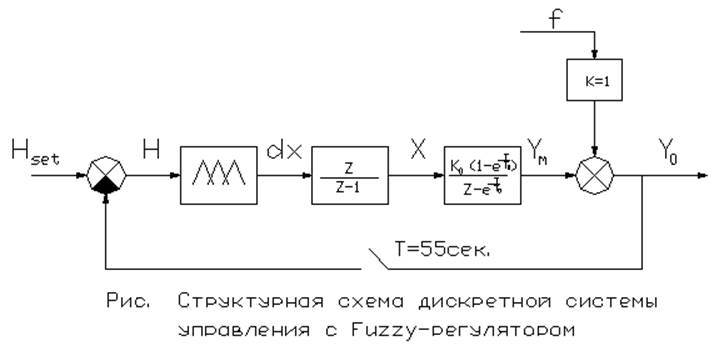
Yм - отклонение величины расхода от номинала, вызванное управляющим воздействием, кПа;
Х – управляющее воздействие, %;
Fset – задание, м куб/с;
F – величина рассогласования, м куб/с;
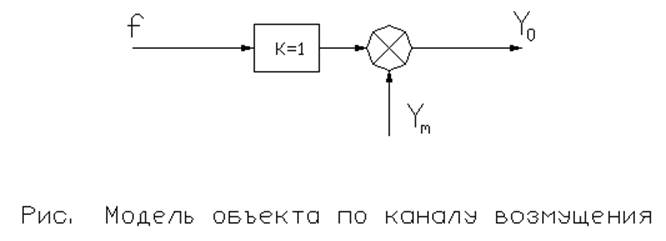
Yo – выход системы, кПа;
f - сигнал возмущения, кПа.
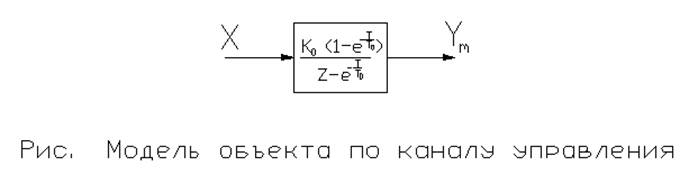
Дискретная модель будет выглядеть следующим образом:
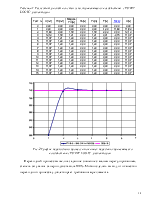
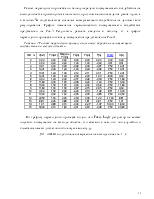
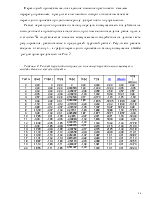
Расчет управляющего воздействия (приращения величины открытия клапана) осуществляется в пакете FuzzyLogic++ фирмы «Siemens», а расчет ошибки регулирования в Microsoft Excel. Результаты расчета сведены в таблицу 1., а переходный процесс по управлению представлен на Рис. 2.
Таблица 1 Результат расчёта системы по управляющему воздействию с FUZZY
LOGIC- регулятором
|
Такт n |
X[n-1] |
Ym[n-1] |
Модель Ym[n] |
Yв[n] |
Yo[n] |
F[n] |
Fuzzy |
X[n] |
|
0 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
|
1 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
-1,20 |
11,82 |
11,82 |
|
2 |
11,82 |
0,00 |
1,18 |
0,00 |
1,18 |
-0,02 |
0,30 |
12,12 |
|
3 |
12,12 |
1,18 |
1,21 |
0,00 |
1,21 |
0,01 |
-0,15 |
11,97 |
|
4 |
11,97 |
1,21 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
5 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
6 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
7 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
8 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
9 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
10 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
11 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
12 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
13 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
14 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
|
15 |
11,97 |
1,20 |
1,20 |
0,00 |
1,20 |
0,00 |
0,00 |
11,97 |
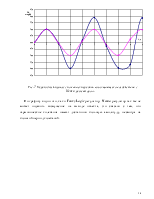
Рис.2 График переходного процесса по каналу передачи управляющего воздействия с FUZZY LOGIC- регулятором
Переходный процесс вышел на заданное значение с малым перегулированием, степень затухания за период составила 100%. Можно сделать вывод, что качество переходного процесса удовлетворяет требованиям регламента.
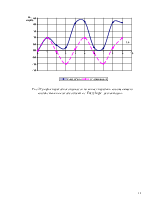
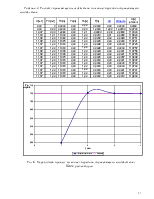
Расчет переходного процесса по каналу передачи возмущающего воздействия на выходе объекта производится аналогично, при этом величина задания равна нулю, а в столбец Yв подставляются значения возмущающего воздействия на данном такте регулирования. График изменения гармонического возмущающего воздействия представлен на Рис.3 Результаты расчета сведены в таблицу 2., а график переходного процесса по каналу возмущения представлен на Рис 4.
Таблица 2 Расчет переходного процесса по каналу передачи возмущающего воздействия на выходе объекта
|
Такт n |
X[n-1] |
Ym[n-1] |
Модель Ym[n] |
Yв[n] |
Yo[n] |
F[n] |
Fuzzy |
X[n] |
|
0 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
0,00 |
|
1 |
0,00 |
0,00 |
0,00 |
1,00 |
1,00 |
-0,20 |
4,91 |
4,91 |
|
2 |
4,91 |
0,00 |
0,49 |
-0,06 |
0,43 |
-0,77 |
7,50 |
12,41 |
|
3 |
12,41 |
0,49 |
1,24 |
-1,00 |
0,24 |
-0,96 |
7,50 |
19,91 |
|
4 |
19,91 |
1,24 |
1,99 |
0,12 |
2,11 |
0,91 |
-7,50 |
12,41 |
|
5 |
12,41 |
1,99 |
1,24 |
0,99 |
2,23 |
1,03 |
-8,09 |
4,32 |
|
6 |
4,32 |
1,24 |
0,43 |
-0,17 |
0,26 |
-0,94 |
7,50 |
11,82 |
|
7 |
11,82 |
0,43 |
1,18 |
-0,98 |
0,20 |
-1,00 |
7,50 |
19,32 |
|
8 |
19,32 |
1,18 |
1,93 |
0,23 |
2,16 |
0,96 |
-7,50 |
11,82 |
|
9 |
11,82 |
1,93 |
1,18 |
0,97 |
2,15 |
0,95 |
-7,50 |
4,32 |
|
10 |
4,32 |
1,18 |
0,43 |
-0,29 |
0,14 |
-1,06 |
8,71 |
13,03 |
|
11 |
13,03 |
0,43 |
1,30 |
-0,95 |
0,35 |
-0,85 |
7,50 |
20,53 |
|
12 |
20,53 |
1,30 |
2,05 |
0,34 |
2,40 |
1,20 |
-11,72 |
8,81 |
|
13 |
8,81 |
2,05 |
0,88 |
0,93 |
1,81 |
0,61 |
-7,50 |
1,31 |
|
14 |
1,31 |
0,88 |
0,13 |
-0,40 |
-0,27 |
-1,47 |
14,99 |
16,30 |
|
15 |
16,30 |
0,13 |
1,63 |
-0,91 |
0,72 |
-0,48 |
7,50 |
23,80 |
По графику переходного процесса видно, что Fuzzy Logic-регулятор не может подавить возмущение на выходе объекта, это связано с тем, что оно случайно и колебания имеют достаточно большую амплитуду.
![]() -вид сигнала возмущения на выходе объекта. t - с
-вид сигнала возмущения на выходе объекта. t - с
Рис.3 График переходного процесса по каналу передачи возмущающего воздействия на выходе объекта с Fuzzylogic- регулятором.
Демо-версия NeuroSystem позволяет выбирать различные системы. Могут быть выбраны системы SIMATIC S7-300, SIMATIC S7-400 и WinCC. Правильный выбор системы позволяет избежать возможных проблем
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.