




1. Параметры технич. состояния рулевого мех-ма и его привода. Методы и средства контроля. Влияние параметров на БД
К основным параметрам тех. сост. рулевого мех-ма, согласно ГОСТ Р 51709-2001, относят: 1)Усилие при повороте рулевого колеса – оно должно быть плавным во всем диапазоне угла поворота. Данное требование проверяют на неподвижном АТС при работающем двигателе путем поочередного поворота рулевого колеса на максимальный угол в каждую сторону; 2)Самопроизвольный поворот рулевого колеса с усилителем рулевого управления от нейтрального положения при неподвижном АТС и работающем двигателе не допускается – контролируется визуально; 3)Суммарный люфт в рулевом управлении не должен превышать предельных значений, указанных изготовителем АТС в эксплуатационной документации, или след. значений: д/легк. авт. - 10º, д/грузовых - 25º. Контролируется на неподвижном АТС с использованием люфтомера, фиксирующего угол поворота рулевого колеса и начало поворота управляемых колес; 4)Подвижность рулевой колонки в плоскостях, проходящих ч/з ее ось, рулевого колеса в осевом направлении, деталей рулевого привода относительно друг друга или опорной пов-ти не допускается. Резьбовые соед. д.б. затянуты и зафиксированы. Контролируют на неподвижном АТС при неработающем двигателе путем приложения нагрузок к узлам рулевого управления и простукивания резьбовых соединений; 5)Не допускается прим-е дет-ей со следами остаточной деформации – контролируют визуально на неподвижном АТС; 6)Натяжение ремня привода насоса усилителя и уровень раб. жидкости должны соот. треб-м, установленным изготовителем. Подтекание раб. жидкости не доп-ся. Контролируется с помощью спец. приборов д/одновременного контроля усилия и перемещения или с использованием линейки и динамометра с максимальной погрешностью не более 7 %.
2. Шины и колеса. Параметры технического состояния. Методы и средства балансировки колес. Влияние параметров на БД.
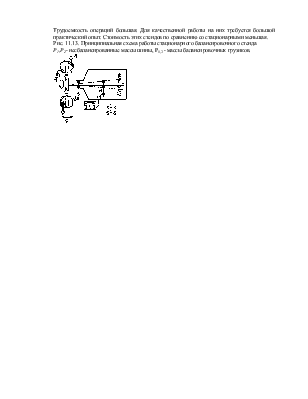
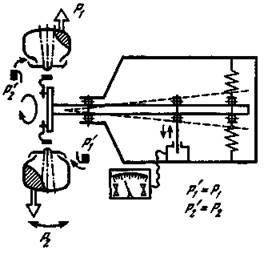
Для балансировки колес в основном применяют стационарные стенды, требующие снятия колеса с автомобиля и обеспечивающие совместную статическую и динамическую балансировку. Колесо закрепляют на валу стенда и раскручивают в зависимости от конструкции стенда вручную или электродвигателем. От несбалансированных масс возникает знакопеременный изгибающий момент, в результате чего вал стенда совершает колебания (рис. 11.13). Если вал закреплен жестко, в опорах возникают напряжения, регистрируемые специальными датчиками. Сигналы обрабатываются и выводятся на пульт (информационное табло) или на монитор.
Для легковых автомобилей иногда применяют передвижные (подкатные) приспособления, позволяющие проводить балансировку колеса непосредственно на автомобиле, но, как правило, вначале статическую, затем, что сложно технологически, динамическую. Трудоемкость операций большая. Для качественной работы на них требуется большой практический опыт. Стоимость этих стендов по сравнению со стационарными меньшая.
Рис. 11.13. Принципиальная схема работы стационарного балансировочного стенда
P1,P2- несбалансированные массы шины, P1,2 - массы балансировочных грузиков.
3. Параметры установки управляемых колёс. Их влияние на износ шин, расход топлива.
А) Схождение колёс ε – угол, образованный горизонтальными диаметрами колёс. Оно служит для компенсации отклонения колёс (положения средней плоскости колеса) от направления движения. При движении колёса стремятся занять положение, II направлению движения. Также компенсирует развал колёс (компенсация положительного развала – положительное схождение).
ε = В-А, где В-расстояние между задними частями передних колёс, А-расстояние между передними частями передних колёс. Чем больше скорость, тем меньше схождение.
При большом схождении -рысканье; недостаточное -нечувствительность
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.