








Балтийский государственный технический университет «ВОЕНМЕХ» им. Д.Ф.Устинова
Кафедра Е1
Вариант 2.7
Выполнила: Клюкина Е.А.
Группа: Е181
Преподаватель: Цепелев В.С.
Санкт-Петербург
2013
Цель работы:
Провести параметрический синтез уравновешивающего механизма толкающего типа по следующим исходным данным:
тип орудия - …САО…………
вес качающейся части – Qk =…5000……H
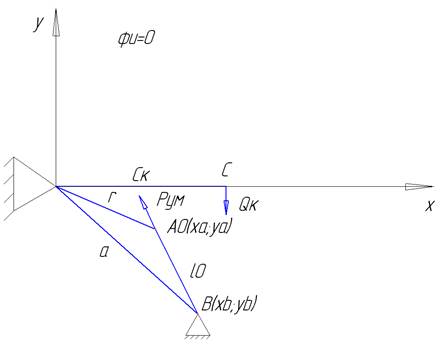
положение центра тяжестикачающейся части:
– Ck = 0,5 2м; –α0 =50
координаты подвижного шарнира(А)
– XA = 0,54м; – YA = - 0,15м
координаты неподвижного шарнира(B)
– XB = 0,6м; – YB = - 0,6м
Дополнительные условия:
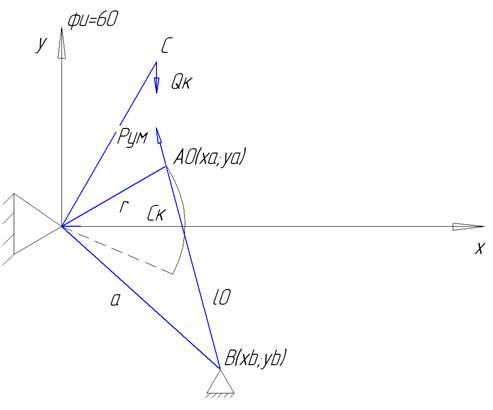
1.диапазон углов вертикальной наводки -50≤ φ≤ 600;
2. показатель политропы воздуха в пневмоцилиндре принять ν=1.
Исходными данными для расчета уравновешивающего механизма являются:
|
Qк Ск Xa Ya Xb Yb φ φ α0 α0 |
14830 1,2 0,7 -0,3 1 -0,9 5 60 -3 -0,05236 |
Н м м м м м ° ° ° рад. |
количество колонок N=1.
Диапазон углов возвышения φ min ... φ max, разбиваем на ряд с интервалом 5°.

1.Расчет начальных параметров
1. Определяем расстояние от оси цапф до подвижного шарнира:
![]() =0,7616 [м]
=0,7616 [м]
2.Определяем расстояние от оси цапф до неподвижного шарнира
![]() =1,3454 [м]
=1,3454 [м]
3. Находим угол между радиусами a и r при φ=00
β0=
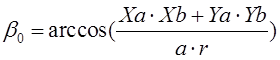 =0,32790
=0,32790
При вычислениях используются следующие выражения:
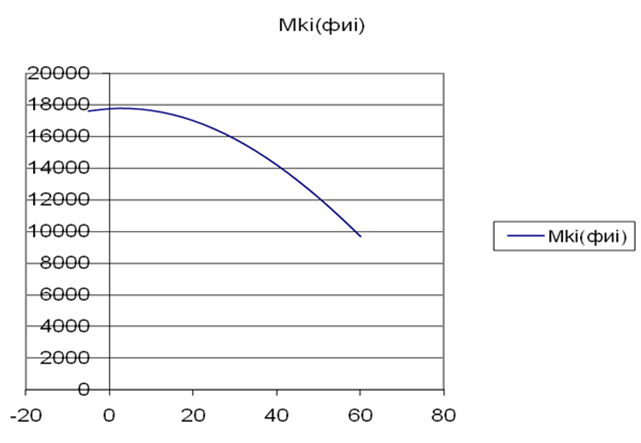
1) момент веса качающейся части для всего
Мкi=Мк0*cosαi , [H*м2] где
Мк0=Qк*Cк - постоянная составляющая момента.
2) расстояние li между неподвижными и подвижными шарнирами УМ, т. е. текущее расстояние АВ
![]() [м],
[м],
3) плечо действия силы УМ на качающуюся часть орудия относительно оси цапф
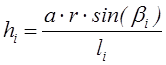 [м],
[м],
4) ход подвижного шарнира А относительно неподвижного В
![]() [м], где значение
[м], где значение ![]() берем из рассчитанных значений li;
берем из рассчитанных значений li;
5) значения сил веса качающейся части орудия в зоне подвижного шарнира А
 , Н.
, Н.
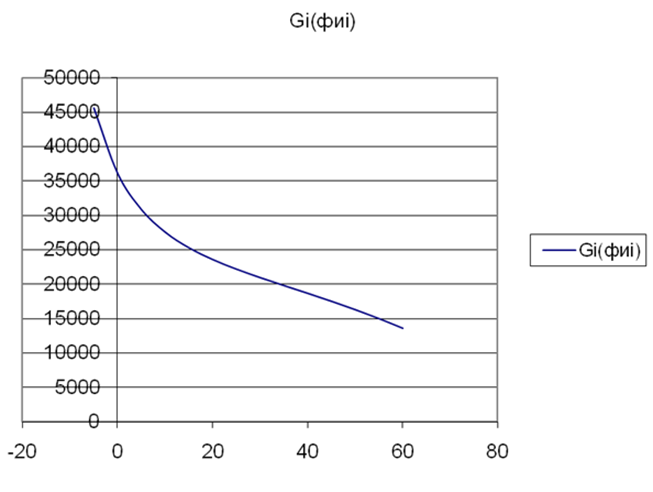
3. Определение расчетных углов возвышения
Сила
![]() должна монотонно убывать с увеличением угла
возвышения.
должна монотонно убывать с увеличением угла
возвышения.
 , то в качестве расчетных углов принимают:
, то в качестве расчетных углов принимают: ![]() ,
, ![]() .
.
4. Расчет параметров исходного варианта для пружиннго механизма
1. Определяется жесткость пружины
![]()
2.
Определяется L: ![]() =1,85
=1,85
3. Определяются
усилие ![]() и
момент пружинного уравновешивающего механизма
и
момент пружинного уравновешивающего механизма ![]() для
каждого значения угла возвышения φi:
для
каждого значения угла возвышения φi: ![]() ,
H
,
H
![]() ,
H*м
,
H*м
4. Для каждого значения угла возвышения φi находися разность моменты неуравновешенности ΔМi уравновешивающего механизма:
![]() ,
H*м
,
H*м
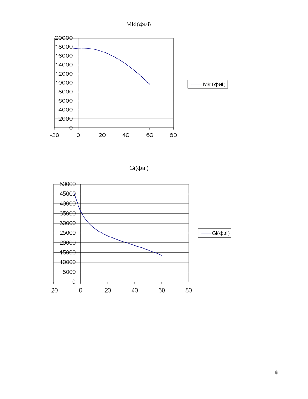
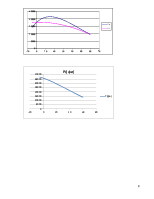
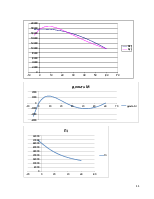
5. По результатам
расчета составляются таблица расчетных значений ![]() ,
,
![]() ,
,
![]() ,
,
![]() и
строятся графики
и
строятся графики ![]() ,
,
![]() ,
,
![]()
|
φi,° |
Mki, Н •м |
Pi, Н |
|
|
|
-5 |
17622,81055 |
37296,01357 |
14403,23419 |
-3219,57636 |
|
0 |
17771,6112 |
36125,93701 |
17771,6112 |
0 |
|
5 |
17785,15916 |
34704,28812 |
19988,00889 |
2202,849733 |
|
10 |
17663,35131 |
33086,52109 |
21181,16135 |
3517,81004 |
|
15 |
17407,1147 |
31321,40732 |
21533,60978 |
4126,495076 |
|
20 |
17018,39944 |
29449,80002 |
21230,43236 |
4212,032919 |
|
25 |
16500,16388 |
27505,11406 |
20435,59152 |
3935,42764 |
|
30 |
15856,3521 |
25514,47171 |
19285,18078 |
3428,828675 |
|
35 |
15091,86392 |
23499,94493 |
17888,65134 |
2796,787417 |
|
40 |
14212,51754 |
21479,65509 |
16332,84469 |
2120,327158 |
|
45 |
13225,00531 |
19468,66382 |
14686,40198 |
1461,396671 |
|
50 |
12136,84281 |
17479,66346 |
13003,6259 |
866,7830886 |
|
55 |
10956,31161 |
15523,50044 |
11327,56881 |
371,2571994 |
|
60 |
9692,396265 |
13609,56784 |
9692,396265 |
0 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.