Представление команд соотмодевием временных интерваллов позволяет реализовать в КРЛ малую величину аппаратурных ошибок, поскольку при изменении мощности принятого сигнала или амплитуднах характеристик радиотракта величина относительного изменения промежутков меняется незначительно. Аппаратурная реализация такой радиолинии получается сравнительно несложной. Раосмотрин в качестве примера двухканальвую аналоговую радиолинию с модуляцией ВИМ (ИВС)-АМ, функциональные схемы передающего и приемного трактов которой изображены на рис 9а, а временные диаграммы, поясняющие формирование модулирующего сигнала.- на рис. 9 б. Для передачи команд в каждом из каналов радиолинии используется время-импульсная модуляция (ВИМ) поднесущего колебания. При этом значение передаваемой команды определяется положением рабочего импульса (РИ) относительно тактового импульса (ТИ). Следовательно, имеет место преобразование командного сообщения uкс(t) в соотношение временных интервалов. Рабочий импульс, который вырабатывается на выходе формирующего каскада, соответствует границе временных интервалов TI и Т2.
АППАРАТУРА КОДИРОВАНИЯ И УПЛОТНЕНИЯ КАНАЛОВ
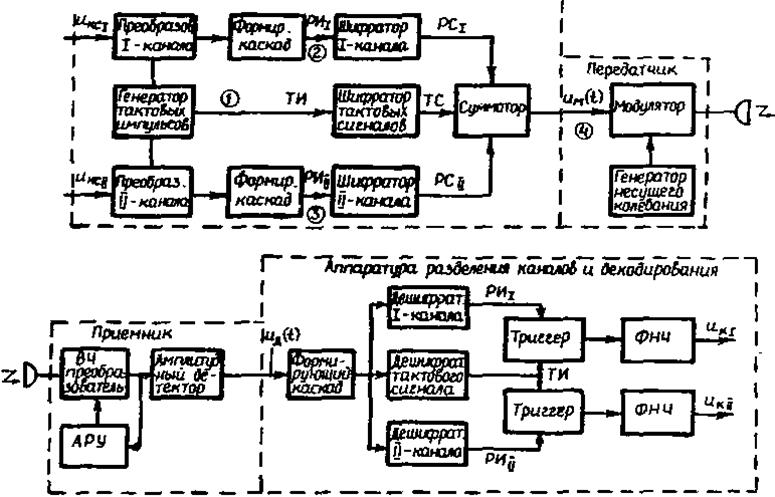
рис 9
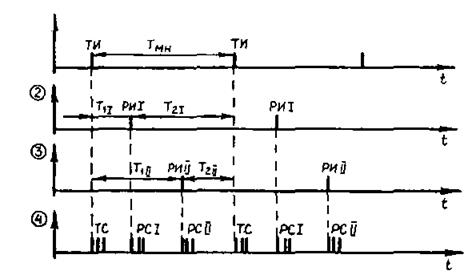
рис9..
В рассматриваемой радиолинии возможны различные способы уплотнения каналов и, соответственно, различные структуры модулирующего сигнала. Наибольшее применение находит способ структурно-временного уплотнения каналов с использованием импульсно-временных сигналов. (ИВС), которые формируется с помощьв шифраторов. Параметрами ИВС являются число импульсов в кодовой группе, образующей данный сигнал (nc), длительность импульсов ( tи ) и величина временных интервалов между отдельными импульсами. Тактовый сигнал (ТС) является сннхронизирующим и предназначается для создания отметок времени, которые используется в качестве начала отсчета временных интервалов. Рабочие сигналы первого и второго каналов (РС1 в РСП) служат для передачи значений соответствующих временных интервалов. Рабочий сигнал первого канала может перемещаться в пределах одной половины периода Тми, а рабочий сигнал второго канала - в пределах другой половины этого периода. Тем самым исключаегся перекрытие рабочих сигналов во времени и, следовательно, устраняются междуканальные помехи.
В радиолинии ВИМ (ИВС)-АМ несущее колебание модулируется во амплитуде импульсным сигналом им (t) , который образуется на выходе сумматора в результате объединения тактовых и рабочих сигналов.
В приемном устройстве производится амплитудное детектирование несущего колебания. Для разделения тактовых и рабочих ИВС используется соответствующие дешифраторы. На вход дешифраторов поступают импульсы стандартной формы, которые вырабатывается из принятого сигнала о помощью формирующего каскада. Эти импульсы нормированы по амплитуде и по длительности; тем самым уменьшается влияние различных искажения принятого сигнала, возникающих под действием помех.
С выхода ДШ снимаются тактовые и рабочие импульсы (Ти,РИт, РИп), которые осуществляют запуск триггеров соответствующих каналов. На выходе триггеров вырабатывается; сигналы с широтно-импульсной модуляцией, которые преобразуется затем в непрерывные командвые сигналы ( ик1. и uк11). Эта часть приемного тракта представляет собой демодулятор ШИМ.
Произведем оценку помехоустойчивости систем передачи информации, использующих импульсные коды.
ПОМЕХОУСТОЙЧИВОСТЬ СИСТЕМ ПЕРЕДАЧИ С ИМПУЛЬСНЫМ ИЗЛУЧЕНИЕМ
Помехоустойчивость систем на базе бинарных импульсных кодов оценивается так же, как и для систем с амплитудной манипуляцией, т.е. с цифровыми двоичными сигналами вида КИМ2-АМ.
Потенциальная помехоустойчивость таких систем при когерентном приеме полностью известных сигналов оценивается вероятностью искажения элементарного символа кода, которая равна
|
|
где ![]()
Ф(х)- интеграл вероятности (функция Крампа).
Как видно из формулы , потенциальная помехоустойчивость полностью определяется параметром h0 , т.е. отношением энергии сигнала Ес к спектральной плотности N0 помехи в виде нормального белого шума. Здесь предполагается, что все параметры принимаемых сигналов (в том числе и их фаза) точно известны. В этих условиях может быть использован когерентный (синхронный) метод приема, при котором возникновение ошибок обусловлено воздействием лишь одной составляющей напряжения помех (синфазной или противоположной с сигналом).
В реальных каналах связи вследствие замираний сигнала,нестабильности фазы излучаемых передатчиком колебаний и других причин реализация оптимального (когерентного) приема встречает серьезные технические трудности. В реальном приемнике АМн-колебаний, включающем наряду с фильтрами высоких и низких частот также амплитудный детектор и пороговое устройство, информация о фазе сигнала не используется и единственным признаком, позволяющим принимать АМн-колебания, является величина амплитуды колебаний. Если напряжение на выходе детектора приемника превышает некоторый пороговый уровень Uпор, то фиксируется сигнал "I", если это напряжение ниже Uпор , то фиксируется сигнал "О". Такой прием называется не когерентным.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.