

Качка корабля на волнении,
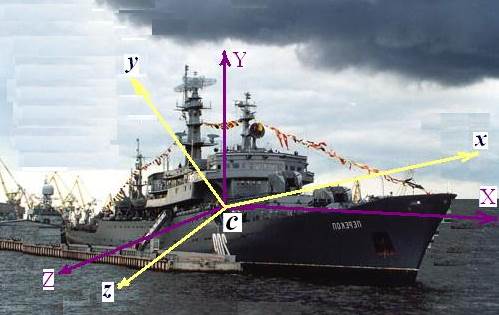
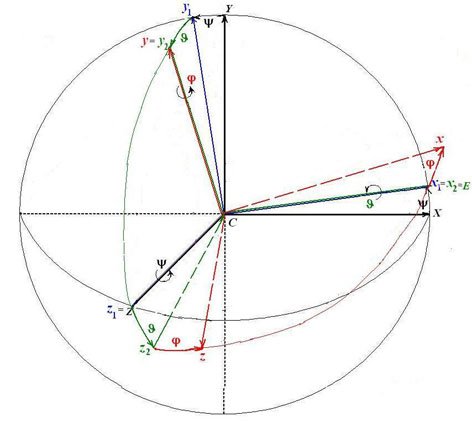
Корабельная система координат Крылова А.Н.
Углы Крылова
угол дифферента ![]() , (килевая
качка)
, (килевая
качка)
угол крена ![]() , (бортовая качка)
, (бортовая качка)
угол рыскания
![]() .
.
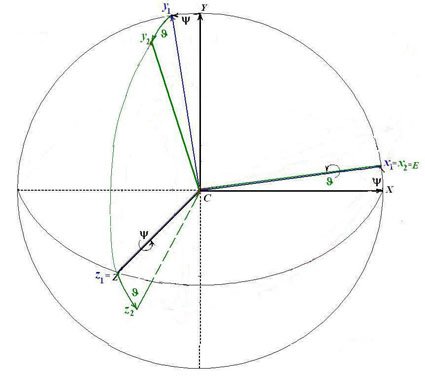
Переход от осей неподвижной системы координат CXYZ к системе Cxyz, неизменно связанной с кораблем, выполняется с помощью трех поворотов:
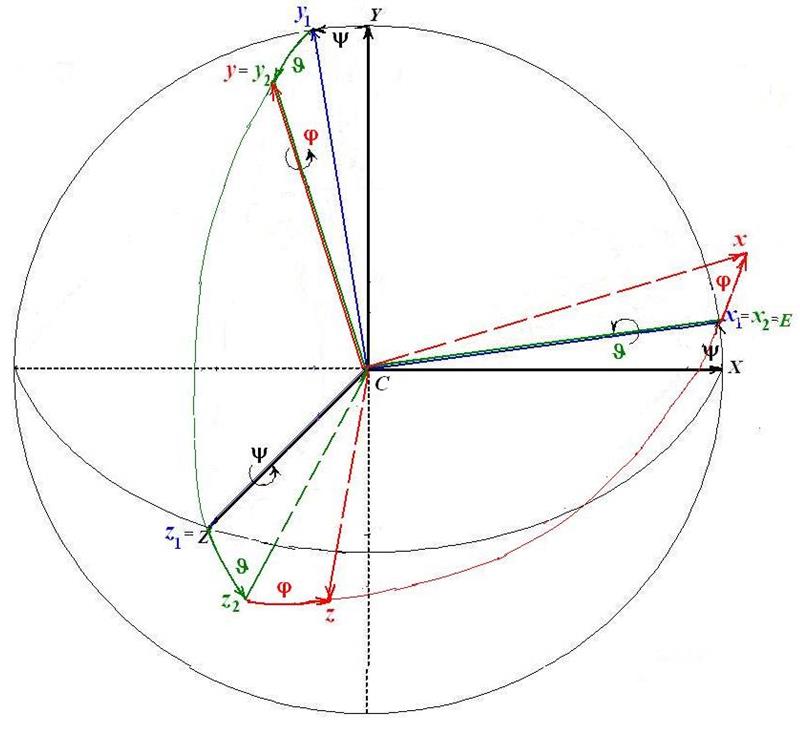
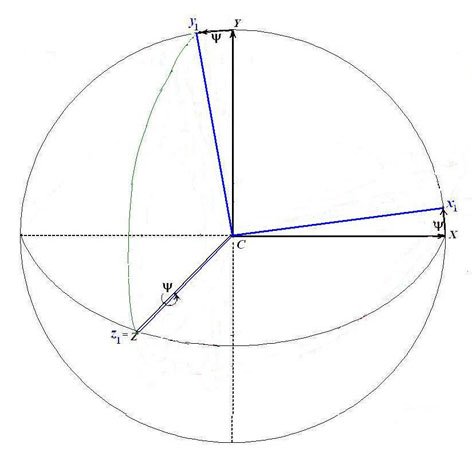
1) поворот системы CXYZвокруг
третьей из координатных осей CZ= Cz1 на угол дифферента ![]() , в результате чего получим систему Cx1y1z1.
, в результате чего получим систему Cx1y1z1.
Формулы преобразования координат связаны следующими соотношениями в матричной форме:
от CXYZ Þ к ![]() [X] ={ a3y}т
[x1] ,
[X] ={ a3y}т
[x1] ,
или  (1) , где
(1) , где ![]() - поворотная матрица, транспонированная к матрице
- поворотная матрица, транспонированная к матрице![]() ,
,
 . (2).
. (2).
2)
поворот системы ![]() вокруг первой из координатных осей
вокруг первой из координатных осей ![]() на угол крена
на угол крена ![]() , в результате чего получим систему
, в результате чего получим систему ![]() , при этом
, при этом ![]() .
.
Формулы преобразования координат связаны следующими соотношениями в матричной форме:
от
системы ![]() Þк системе
Þк системе ![]()
[x1] = ![]() [x2] , или
[x2] , или  (3), где
(3), где ![]() – поворотная матрица, транспонированная к
матрице
– поворотная матрица, транспонированная к
матрице ![]() ,
,
 . (4)
. (4)
3)
поворот системы ![]() вокруг второй из координатных осей
вокруг второй из координатных осей ![]() на угол рыскания
на угол рыскания ![]() , в результате чего приходим к системе
Cxyz, при этом.
, в результате чего приходим к системе
Cxyz, при этом. ![]() =
= ![]() .
.
Формулы преобразования координат связаны следующими соотношениями в матричной форме:
от системы координат ![]() Þ к системе Cxyz[x2]=
Þ к системе Cxyz[x2]= ![]() [x], или
[x], или  ,(5) где поворотная матрица {a2j }т
– это матрица, транспонированная к матрице { a2j }, имеет
вид
,(5) где поворотная матрица {a2j }т
– это матрица, транспонированная к матрице { a2j }, имеет
вид
 (6). (6)
(6). (6)
Подставляя в (1) соотношения (3) и (5), получаем:
![]() или
или ![]() или
или  , (7)
, (7)
Где
матрица ![]() транспонирована к матрице направляющих
косинусов
транспонирована к матрице направляющих
косинусов ![]() , является произведением трех поворотных матриц
, является произведением трех поворотных матриц
![]()
![]() =
=
=
 .(8)
.(8)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.