1. АНАЛИТИЧЕСКИЙ ОБЗОР МЕТОДОВ ТЕРМОРЕГУЛИРОВАНИЯ
1.1. Общие принципы терморегулирования.
Технологические процессы, протекающие в промышленных агрегатах, находятся под воздействием возмущений, которые вызывают отклонения координат процесса от их номинальных значений. Например, изменение потребления пара от парового котла вызовет изменение давления и температуры пара. Чтобы вернуть эти координаты к заданным значениям, необходимо изменить материальные и энергетические потоки, поступающие в агрегат, в данном случае изменить подачу топлива в котел и расход воды на охлаждение пара. Эти изменения могут быть выполнены с помощью автоматических устройств, которые, взаимодействуя с агрегатом, образуют систему автоматического регулирования. Такая система состоит из объекта регулирования, которым является управляемый участок технологического процесса и автоматического регулятора. Последний представляет собой совокупность взаимосвязанных устройств, измеряющих отклонение координаты объекта от заданного значения и автоматически изменяющих с помощью регулирующего органа поток вещества или энергии в объект так, чтобы уменьшить или ликвидировать эти отклонения.
На рис. 1.1 изображена схема простейшей системы регулирования, состоящей из регулируемого объекта О и автоматического регулятора Р.
К объекту автоматического регулирования принято относить регулируемый участок 1, регулирующий орган 3 и чувствительный элемент 2. Регулирующий орган непосредственно воздействует на процесс в агрегате, изменяя поток вещества или энергии в объект. Количество вещества или энергии, поступающее в объект через регулирующий орган, принято называть входной координатой объекта у.
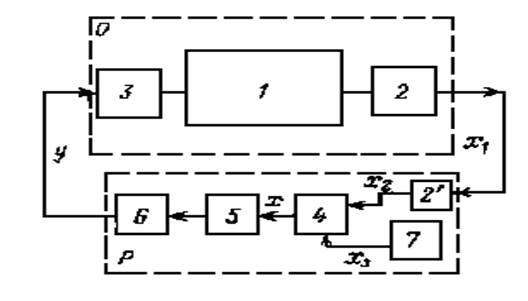
Рис.1.1. Простейшая схема системы регулирования
Чувствительный элемент измеряет текущее значение регулируемой величины. С помощью датчика (первичного измерительного преобразователя) 2’ результат измерения преобразуется в сигнал x2
удобный для последующих операций. Текущее значение сигнала на выходе чувствительного элемента принято считать выходной координатой объекта x1.
Подавляющее большинство измеряемых координат объекта преобразуется в электрические сигналы, механические перемещения или давления газов и жидкостей.
Основными элементами автоматического регулятора являются датчик 2’, входное устройство 4, формирующее устройство 5, исполнительный механизм 6 и задатчик 7.
Входное устройство предназначено для получения отклонения текущего значения регулируемой координаты x2 от задания x3. Сигнал x = x2—x3 называется сигналом отклонения, ошибки или рассогласования.
Во многих случаях во входном устройстве алгебраически суммируются сигналы двух и более датчиков. Такие устройства предназначены обычно для регулирования соотношений расходов, введения дополнительных сигналов от возмущающих воздействий и т. п. В зависимости от количества сигналов, поступающих во входное устройство от датчиков, регулятор называется одноимпульсным, двухимпульсным и т. д.
Формирующее устройство 5 предназначено для преобразования сигнала xтаким образом, чтобы на выходе исполнительного механизма получить заданный закон регулирования.
Под законом регулирования понимается вид математической зависимости между выходной координатой регулятора у и отклонением регулируемой координаты x. Входящие в эту зависимость коэффициенты, изменяемые с помощью настроечных приспособлений, носят
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.