Кинематическая пара (нематериальное понятие) – подвижное соединение двух звеньев.
Кривошип – звено поворачивающееся на 3600.
Для анализа работы механической системы была выбрана схема, изображенная на рис. 1.
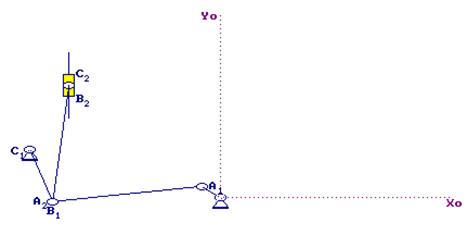
Рис. 1
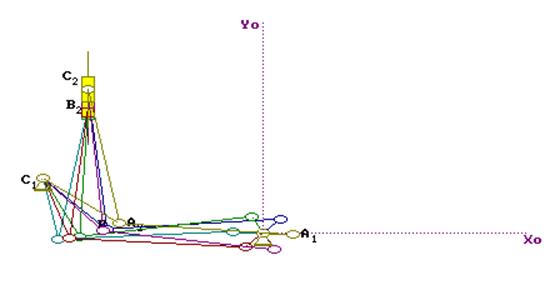
Рис. 2
2.2 Проверка работоспособности механизма.
Можно проверить двумя способами: аналитически и по формуле Чебышева.
Рассчитаем работоспособность механизма формульным методом:
W = 3·(n - 1) - 2p1 , где W – степень подвижности, р1 – число одноподвижных кинематических пар
n – 1 – число подвижных звеньев
W = 3·(6 - 1) - 2·7 = 15 – 14 = 1
Вывод: Согласно полученному результату механизм работоспособен и для его работы необходим один двигатель.
Проверка работоспособности графическим методом сделана в приложении 1 (лист формата А3). Выполнено построение 6 положений механизма, начальный угол равен 00.
3. Кинематика преобразовательного механизма.
3.1 Закон движения кривошипа.
Угловая скорость движения кривошипа вычисляется по формуле:
ωкр=n/9.55 , где n – число об/мин.
По заданию:
ωкр=142/9.55=14,869 1/с.
В разделе «Кинематический анализ» определить скорость и ускорение исполнительного органа. Выписать скорость и ускорение исполнительного органа для 2400 или 3000. Для данного механизма было взято 2400.
Были получены результаты:
Vd = 0.19912 м/с
ad = 3.2585 м/с2.
Таблица 1
|
Перемещения |
Скорость |
Ускорения |
||||||
|
№ |
Fi, град. |
X, м |
№ |
Fi, град. |
V, м/с |
№ |
Fi, град. |
a, м/с2 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
-7.4078 |
|
1 |
60 |
-0,012304 |
1 |
60 |
-0,26912 |
1 |
60 |
-0,88466 |
|
2 |
120 |
-0,030696 |
2 |
120 |
-0,21896 |
2 |
120 |
2.0530 |
|
3 |
180 |
-0,039891 |
3 |
180 |
-0,034754 |
3 |
180 |
2.7491 |
|
4 |
240 |
-0,035330 |
4 |
240 |
0,17075 |
4 |
240 |
3.2293 |
|
5 |
300 |
-0,015967 |
5 |
300 |
0,34715 |
5 |
300 |
0,24002 |
|
6 |
360 |
-1.0345e-012 |
6 |
360 |
0 |
6 |
360 |
-7.4078 |
Графики перемещения, скорости и ускорения исполнительного органа (ползуна)
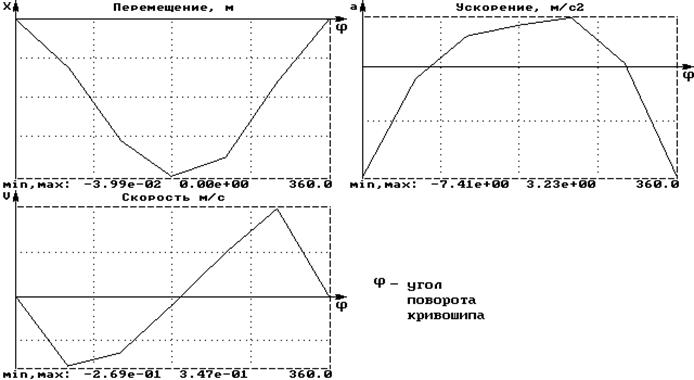
Рис. 3
3.2 Расчет скорости и ускорения графическим методом.
Был построен и выполнен расчет (см. лист формата А3)
Получены результаты:
Vd = 0.20073 м/с
ad = 3.3484 м/с2.
В результате расчета погрешности составили:
 = 1%
= 1%
 = 2.8%
= 2.8%
4. Внешняя нагрузка.
Динамика решает задачи движения рабочей точки с учётом нагрузок действующих на механизм.
Нагрузки бывают:
1. Движущая (Tдв)
2. Сопротивления.
В свою очередь сопротивление делится на:
а) полезное б) вредное (обусловлено трением)
4. Инерционные (неравномерности движения)
Полезное сопротивление в нашем задании равно F = 200 Н. Но было введено другое сопротивление 5500 Н или 5,5 кН. Это можно объяснить тем, что двигателя с требуемой мощностью нет в катологе (по каталогу ЭД - двигатели от 0,5 кВт). Вследствие чего была увеличили нагрузка на рабочий орган, после чего получили мощность Р = 0,709 кВт, что удовлетворяет условию.
Выбираем построение из 36 строк, т.е через каждые 100.
График задания внешней нагрузки
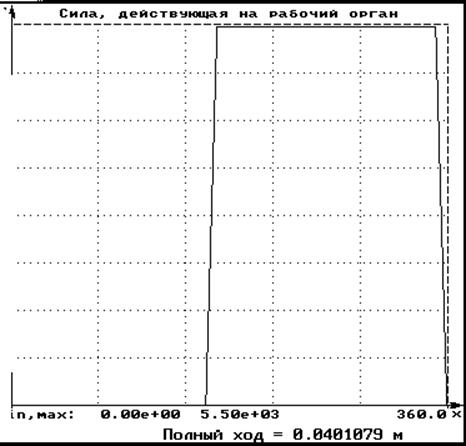
Рис. 4
Максимальный момент: Мmax = 128, 477 [Н*м]
Раннее говорилось, что существует момент вредного сопротивления, который равен 10% от максимального момента. MBC = 12,477 [Н*м]. Учтем его при построении графика.
В результате чего, получаем графики приведенного момента нагрузки без учета вредного сопротивления и с учетом вредного сопротивления.
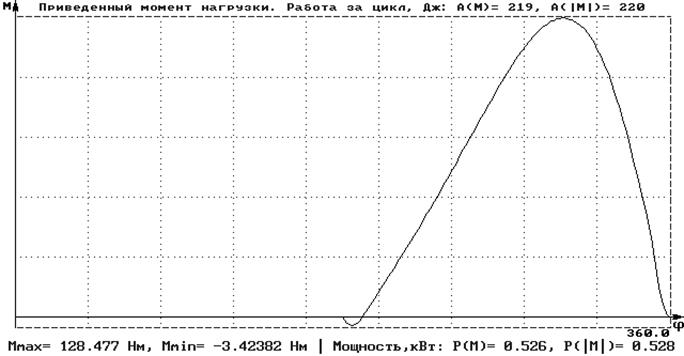
Рис. 5
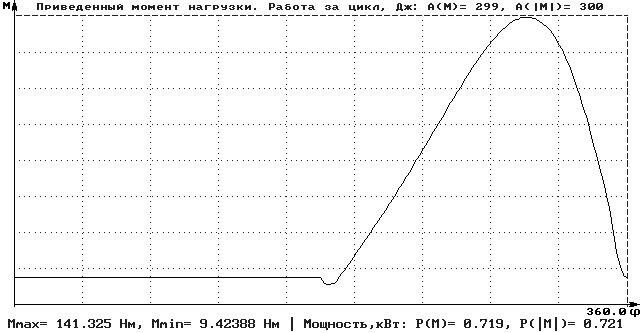
Рис. 6
Таблица 2
|
Выборка из таблицы нагрузки |
|
|
Fi, град. |
Мпр, Н*м |
|
240 |
76,001 |
Максимальный момент: Мmax = 141,325 Н*м.
Мощность: Р = 0,709 кВт.
Далее было выписан момент при 2400 для сравнения с расчётным.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.