2. Дифференциальные трансформаторные датчики — ДТД
Дифференциальные трансформаторные датчики благодаря своим ценным качествам получили наибольшее распространение для измерения неэлектрических величин. К числу положительных качеств следует отнести:
1) высокую чувствительность, которая обеспечивается за счет возможного выполнения вторичной обмотки датчика с большим числом витков;
2) возможность измерения весьма малых перемещений. Это объясняется тем, что датчик имеет высокое выходное сопротивление, которое хорошо согласуется с входным сопротивлением электронного усилителя. Применение последнего позволяет измерить незначительные перемещения (до нескольких микрометров).
3) значительный линейный участок характеристики
ДТД представляет собой два совмещенных трансформатора с общим подвижным якорем. Различают несколько конструктивных форм дифференциально-трансформаторных датчиков, которые отличаются друг от друга магнитной системой: плоские ДТД с магнитопроводом плоской формы и цилиндрические ДТД, v которых магнитопровод имеет круглое сечение.
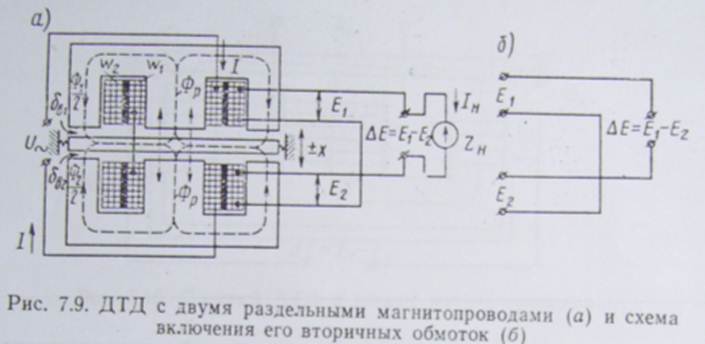 |
Плоский ДТД с двумя раздельными магнитопроводами
(рис. 7.9, а). Каждый из магнитопроводов датчика имеет первичную w1 и вторичную w2 обмотки. Обе половины первичной обмотки имеют одинаковое число витков и включаются последовательно, а вторичные обмотки—встречно (рис. 7.9, б).
Магнитодвижущая сила (м.д.с.) F = Iw1 созданная током I, протекающим в последовательно соединенных первичных обмотках, наводит в каждом магнитопроводе датчика магнитный поток, состоящий из: а) магнитного потока рассеяния Фр между полюсами. Величина этого магнитного потока одинакова для обоих магнитопроводов и не изменяется с изменением положения якоря; б) рабочих магнитных потоков Ф1 и Ф2 между полюсами и якорем. Величина рабочих потоков зависит от намагничивающей силы lw\ и магнитной проводимости G между полюсом и якорем. Магнитная проводимость воздушных зазоров G— величина, обратная магнит-ному сопротивлению Rм магнитной цепи.
Величина магнитной проводимости зависит от площади полюса S и длины зазора δв следующим образом:
![]()
2) μ0 — магнитная проницаемость воздуха (μ0 = 4л1О 7 Г/м).
Значения магнитных потоков определяются выражениями:
![]()
![]()
![]()
Э. д. с. Е1 и Е2, наводимые во вторичных обмотках, подсчитываются по формулам:
![]()

При нейтральном положении якоря имеет место равенство величин
δв1 = δв2= δ0, G1 = G2=G0,, Ф1 = Ф2 и, следовательно, равенство значений
э. д. с. Е1=Е2.
 |
Результирующая э. д. с. на выходе датчика равна нулю. При воздействии на якорь контролируемой величины зазор между якорем и одним из сердечников становится меньше, т. е. δв1 = δ0 - ∆х (при смещении якоря вверх), а между другим сердечником и якорем становится больше, т. е.
δв2 = δ0 + ∆х, где ∆х —смещение якоря. Соответственно изменяются проводимости: G1= Go + ∆C1, G2 = GQ—∆G2. Подставляя данные значений проводимостей C1 и G2 в формулы (7.21) и (7.22), получим:


В некоторых пределах смещения якоря от нейтрального положения изменение проводимостей рабочих зазоров с некоторым приближением можно считать пропорциональным смещению якоря ∆х, т. е.
![]()
где κ — коэффициент пропорциональности.
Подставляя (7.25) в (7.23) и (7.24), после некоторого преобразования получим значение э. д. с. на выходе датчика

где ω = 2πf В зависимости от направления перемещения якоря меняется фаза результирующего э.д.с.
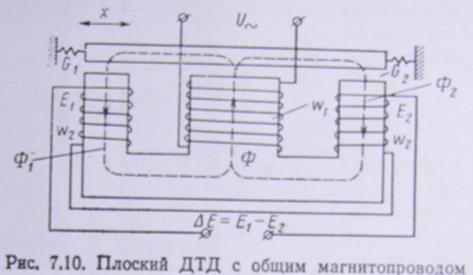
Плоский ДТД с общим магнитопроводом (рис. 7 10) Такой датчик реагирует не на изменение величины воздушного зазора а на изменение его площади. На среднем сердечнике размещается первичная катушка w1, на двух крайних -вторичные w2 (вторичные обмотки включены встречно).
Магнитный поток Ф, определяемый первичной катушкой, разветвляется вправо и влево пропорционально магнитным проводимостям левой и правой частей магнитопровода. При симметричном расположении якоря в магнитопроводе магнитные проводимости обеих частей системы равны друг другу, т. е. G1 = G2 и, следовательно, равны значения э. д. с. для обеих вторичных катушек Е1=Е2. При смещении якоря влево или вправо изменяются, значения магнитных проводимостей G1 и G2соответственно изменяются потоки Ф2 или Ф1 ,а следовательно,
и э. д. с. Е2 или Е1 , т. е. ∆E = E1 - Е2. Фаза ∆E изменяется
 на 180° при смещении якоря в другую
сторону от нейтрального положения.
на 180° при смещении якоря в другую
сторону от нейтрального положения.
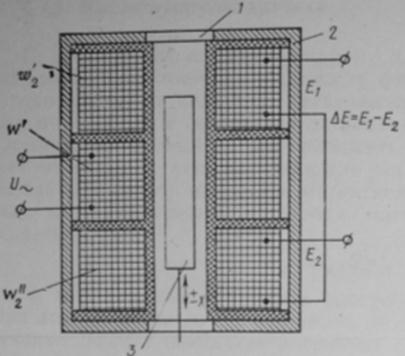
Цилиндрический ДТД с сосредоточенной первичной обмоткой (рис. 7.11); применяется, как правило, при малых ходах якоря (до 1 мм). На общем изоляционном каркасе 1 расположены три катушки: первичная w1 и две вторичные w2и w2". Обе вторичные катушки имеют строго одинаковое число витков и выполняются проводом одного диаметра. Внутри катушек перемещается якорь 3 цилиндрической формы (плунжер), на который воздействует контролируемая величина х. Снаружи катушки охватываются круглым магнитопроводом 2 из листовой электротехнической стали.
При нейтральном положении якоря наведенные в обмотках э. д. с. будут ргзны (Е1 = Е2), а выходное значение э. д. с. равно нулю (∆E = 0). При смещении якоря вверх или вниз от нейтрального положения на величину ∆х: нарушается равенство э. д. с. (так как магнитный поток в одной катушке, например w2', увеличивается, а в другой, w2'', уменьшается) и результирующая э.д.с, равная разности э. д. с. в катушках, приобретает некоторое значение (при встречном включении вторичных катушек)
Где ω- угловая частота; I- ток, протекающий в первичной катушке; ω1 - число витков первичной катушки; ω2 - общее число витков вторичной катушки; к- коэффициент пропорциональности; ∆х - величина смещения якоря. Фаза выходной величины э. д. с. зависит or направления перемещения якоря.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.