после удаления ролика
Примеры структурного анализа
А) Плоский рычажный механизм с низшими парами.
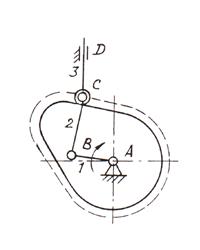
В кривошипно-кулисном механизме (рис. 2.12) указываем номера звеньев цифрами, а кинематические пары буквами. Число подвижных звеньев определяется наивысшей цифрой на схеме (n = 3), а число низших кинематических пар – числом строк в табл. 2.2 (р1 = 4). Число высших пар р2 = 0.
Рис. 2.12. Кривошипно-кулисный механизм
Таблица 2.2. Таблица пар и звеньев
|
Обозначение кинематических пар |
Номера звеньев, входящих в пары |
Вид пары (вращ., пост.) |
|
А |
0-1 |
вращательная |
|
В |
1-2 |
вращательная |
|
В |
2-3 |
поступательная |
|
С |
0-3 |
вращательная |
Примечания.
1. На схеме механизма точка В соответствует двум кинематическим парам: вращательной В1≡В2 между звеньями 1 и 2 и поступательной В3 между звеньями 2 и 3.
2. Неподвижное звено обозначают цифрой 0.
Число степеней свободы механизма W = 3 ∙ 3 – 2 ∙ 4 – 0 = 1. Ответ W = 1 говорит о том, что после отсоединения групп Ассура должен остаться один начальный механизм I класса. В кривошипно-кулисном механизме им является звено 1 – кривошип. Отсоединяем диаду 2-3 третьего вида, состоящую из 2-х звеньев и 3-х кинематических пар. Остается начальный механизм 1 класса (рис. 2.13). Формула строения механизма I(1) – II3(2-3). Заданный механизм – II класса, так как содержит группу Ассура II класса.
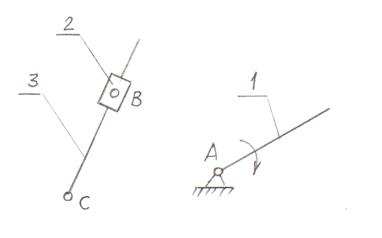
Рис. 2.13. Отсоединение группы Ассура
Б) Шарнирный восьмизвенник (рис. 2.14).
Рис. 2.14. Шарнирный восьмизвенник
Вычерчиваем кинематическую схему. Указываем номера звеньев цифрами, а кинематические пары буквами. Названия звеньев: 1 – кривошип, 2 и 6 - шатуны, 3 и 7 – ползуны, 5 – кулиса, 4 – камень кулисы. Составляем таблицу пар и звеньев (табл. 2.3).
Таблица 2.3. Таблица пар и звеньев
|
Обозначение кинематических пар |
Номера звеньев, входящих в пару |
Вид пары (вращательная, поступательная) |
|
A |
0–1 |
вращательная |
|
B |
1–2 |
вращательная |
|
С |
2–4 |
вращательная |
|
C |
4–5 |
поступательная |
|
D |
2–3 |
вращательная |
|
D |
3–0 |
поступательная |
|
E |
5–0 |
вращательная |
|
F |
5–6 |
вращательная |
|
G |
6–7 |
вращательная |
|
G |
7–0 |
поступательная |
Механизм состоит из 7 подвижных звеньев и одного неподвижного (стойки, которая показана подштриховкой в четырёх местах). Число низших пар p1 = 10. Число степеней механизма W = 3×7 – 2×10 = 1. Отсоединяем наиболее удаленную диаду 2-го вида, состоящую из звеньев 6 и 7, затем диаду 3-го вида (звенья 4 и 5) и, наконец, диаду 2-го вида (2 и 3). Остается один начальный механизм I класса, так как W = 1 (рис. 2.15).
Рис. 2.15. Отсоединение групп Ассура
Формула строения механизма I(1) – II2(2-3) – II3(4-5) - II2(6-7) . Заданный механизм – II класса.
В) Суммирующий механизм (рис. 2.16).
Рис. 2.16. Суммирующий механизм
Вычерчиваем кинематическую схему. Составляем таблицу пар и звеньев (табл. 2.4).
Таблица 2.4. Таблица пар и звеньев
|
Обозначение кинематических пар |
Номера звеньев, входящих в пару |
Вид пары (одноподвижная, двухподвижная) |
|
A |
0–1 |
одноподвижная |
|
B |
1–2 |
двухподвижная |
|
C |
2–3 |
одноподвижная |
|
D |
3–0 |
одноподвижная |
|
E |
2–4 |
двухподвижная |
|
F |
4–0 |
одноподвижная |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.