Некоторые тепловые объекты регулирования, в том числе ТЭН, используемый в нашей лабораторной установке, имеют различные динамические свойства при нагреве и охлаждении. Переходные характеристики (кривые разгона) для нагрева и охлаждения теплового объекта получены в лабораторной работе 2. Они отличаются значениями постоянных времени и могут быть аппроксимированы решениями дифференциальных уравнений 1-го порядка:
Tнy’+ y = y¥ - yo
Toy’+ y = yo’ - y¥ (1)
В лабораторной установке в качестве регулятора с регулируемой зоной нечувствительности используется МПР-51. Его статическая характеристика приведена на рис.4. В зоне нечувствительности состояние регулятора определяется не только значением входного воздействия, но и направлением изменения этого воздействия: при увеличении входного сигнала до Y=а, выходной сигнал скачкообразно принимает значение -Х1 (реле разомкнуто), а при уменьшении входного сигнала до Y=-а выходной скачкообразно принимает значение +Х1 (реле замкнуто).
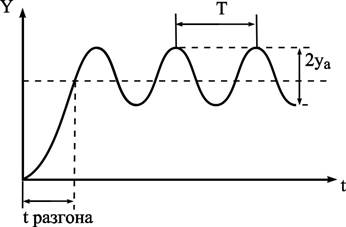
Рис. 3. Кривая переходного процесса двухпозиционного регулирования.
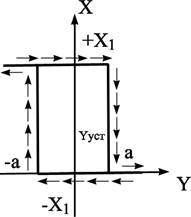
Рис. 4. Статическая характеристика регулятора.
Диапазон установившихся колебаний выходной величины ОР без запаздывания равен зоне неоднозначности двухпозиционного регулятора. Период установившихся колебаний Т зависит от амплитуды регулирующего воздействия. Уменьшение регулирующего воздействия приводит к возрастанию Т. Для объектов регулирования с запаздыванием амплитуда автоколебаний и длительность периода увеличиваются.
3. Порядок и методика проведения работы.
Изучить особенности систем релейного регулирования.
Экспериментальные исследования на стенде проводятся в следующей последовательности:
1. Проверить наличие необходимого оборудования на стенде.
2. Установить задатчиком регулятора МПР51 заданные значения температуры и зоны нечувствительности (по указанию преподавателя). Для этого в режиме ПРОГРММИРОВАНИЯ зайти на уровень L2 выбираем параметр Р07 и устанавливаем значение 002 (это означает что 1-ый регулятор управляет ИУ типа нагреватель). Переходим к параметру Р08 (здесь устанавливаем зону нечувствительности). Способом описанным выше вносим изменения в программу прибора. Переходим на уровень L1. Выбираем параметр Е02 (задается значение уставки). Запись изменений в память прибора осуществляется способом описанным выше. Выходим из режима программирования и запускаем программу двухпозиционного регулирования.
3. С этого момента через каждые 60 с (время с точностью до минуты отображается на индикаторе прибора) фиксировать температуру объекта регулирования и записывать в таблицу отчета. Эксперимент закончить после того, как процесс регулирования примет установившийся характер. Кружочком в таблице отмечать моменты включения и выключения исполнительного механизма. График переходного процесса перечертить в отчет.
4. По полученному графику процесса регулирования определить его показатели качества: амплитуду Уa и период колебаний Ta .
4. Контрольные вопросы.
1. Что такое автоматическая система регулирования (АСР)?
2. Из каких элементов состоит автоматическая система регулирования, их назначение?
3. Какие виды регулирования Вы знаете?
4. Принцип работы позиционного регулятора?
5. Какими показателями оценивается качество двухпозиционного регулирования?
6. Что такое зона нечувствительности?
7. Как влияет величина зоны нечувствительности регулятора на процесс двухпозиционного регулирования?
8. Как влияет увеличение емкости объекта на процесс двухпозиционного регулирования?
9. Как влияет величина запаздывания объекта на качество регулирования.
10. Как можно улучшить качество регулирования двухпозиционной системы?
11.Какими достоинствами обладает двухпозиционный регулятор?
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.