На
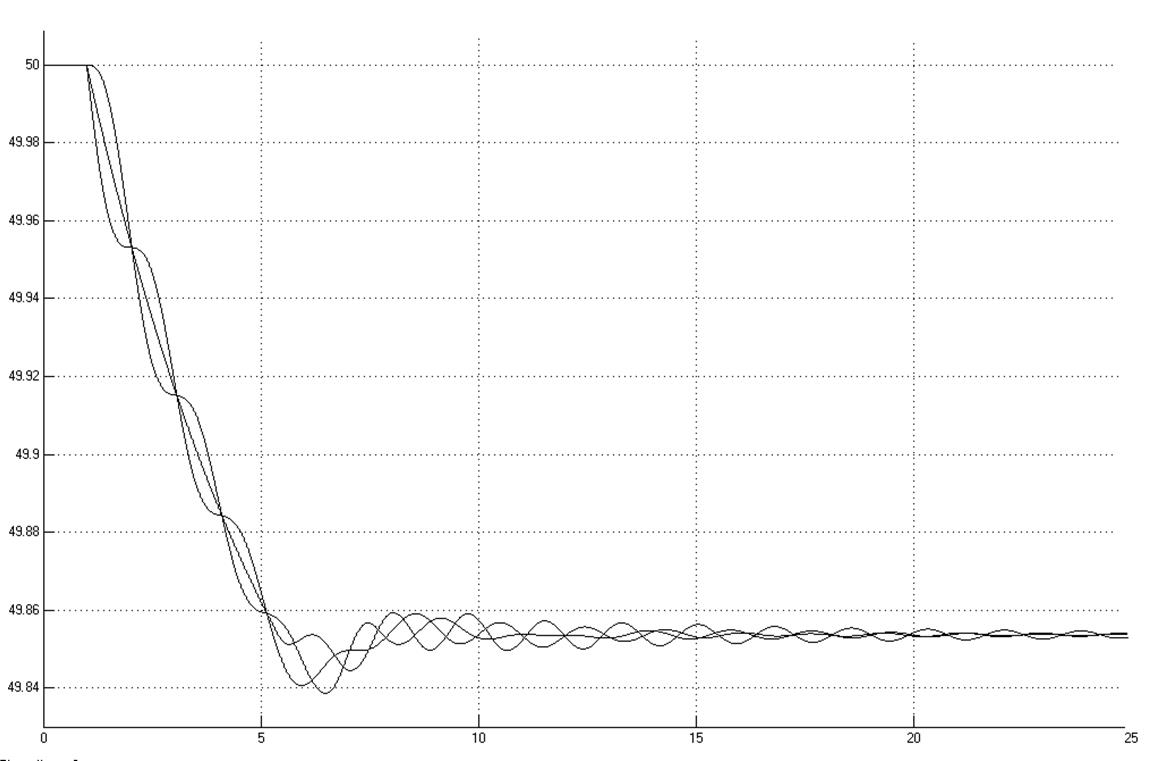
рисунку 3.7 наведені осцилограми для тих же початкових умов, що й у попередньому,
відмінність тільки в тім, що АРЧО мають різну крутість характеристик
регуляторів швидкості ![]() .
.
![]() ;
; ![]() .
.
Як видно з осцилограм
переток потужності між частинами ЕЕС збільшився, а додаткова потужність між
станціями розподілилася пропорційно крутості характеристик регуляторів
швидкості ![]() . Перша станція прийняла на себе, приблизно,
30 %, а друга – 70 %.Частоти в обох частинах ЕЕС зменшилися, приблизно, на
0,165 Гц. З порівняння рисуноков 3.6 й 3.7 треба, що зменшення крутості
характеристик регуляторів швидкості
. Перша станція прийняла на себе, приблизно,
30 %, а друга – 70 %.Частоти в обох частинах ЕЕС зменшилися, приблизно, на
0,165 Гц. З порівняння рисуноков 3.6 й 3.7 треба, що зменшення крутості
характеристик регуляторів швидкості ![]() знижує коливання
перехідного процесу.
знижує коливання
перехідного процесу.
На рисунку 3.8 приведені осцилограми для випадку, коли працюють регулятори частоти й перетоку потужності першої станції, а аналогічні регулятори другої станції відключені (включені перемикачі 10, 11 і виключені 13, 14) Працюють так само регулятори швидкості турбін в обох частинах ЕЕС. Збурювання виникло у вигляді 2 % миттєвого збільшення потужності в першій частині ЕЕС у момент часу t=1сек. Обидві частини ЕЕС однакові й статичні характеристики автоматичних регуляторів частоти обертання (АРЧО) мають однакову крутість.
Як треба з рисунка провідна по частоті перша станція збільшує частоту в обох частинах ЕЕС до номінальної. Переток потужності між станціями в сталому режимі відсутній тому що всю додаткову потужність виниклу в першій частині ЕЕС прийняла на себе перша станція.
На
(рис. 3.9) наведені осцилограми для випадку, коли працюють регулятори частоти
й перетоку потужності першої станції, а аналогічні регулятори другої станції
відключені. Працюють так само регулятори швидкості турбін в обох частинах ЕЕС.
Збурювання виникло у вигляді 2 % миттєвого збільшення потужності в другій
частині ЕЕС у момент часу t=1сек. АРЧО мають різну крутість
характеристик регуляторів швидкості ![]() .
.
![]() ;
; ![]() .
.
У цьому випадку, як видно з рисунка 3.9, резерву потужності провідної по частоті станції виявилося недостатньо, щоб підняти частоту ЕЕС до номінальної. Переток потужності змінив свій знак тобто напрямок переток із другої частини ЕЕС у першу. Перша станція компенсувала тільки 90% наброса потужності в другій частині ЕЕС. У результаті чого в сталому режимі частота ЕЕС зменшилася на 0,05 Гц.
Для відновлення номінальної частоти ЕЕС можна включити регулятори частоти й перетока потужності другої станції. Результати такого вімкнення представлені на рисунку 3.10. Як видно з рисунка частота ЕЕС у цьому випадку відновлюється.


![]()
Рисунок 3.6 - Осцилограми для випадку, коли відсутнє регулювання частоти й перетоку потужності
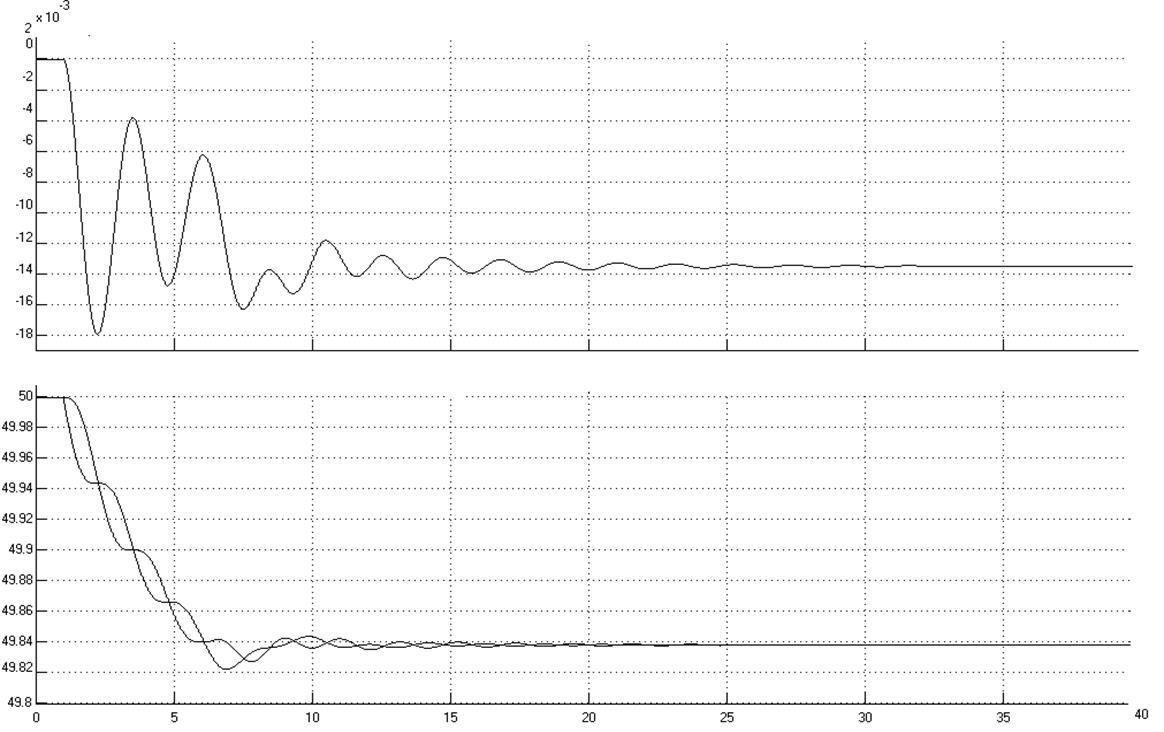 Рисунок 3.7 –Осцилограми
як, що АРЧО мають різну крутість характеристик регуляторів швидкості
Рисунок 3.7 –Осцилограми
як, що АРЧО мають різну крутість характеристик регуляторів швидкості 

Рисунок 3.8 - Осцилограми для випадку, коли працюють регулятори частоти й перетока потужності першої станції, а аналогічні регулятори другої станції відключені

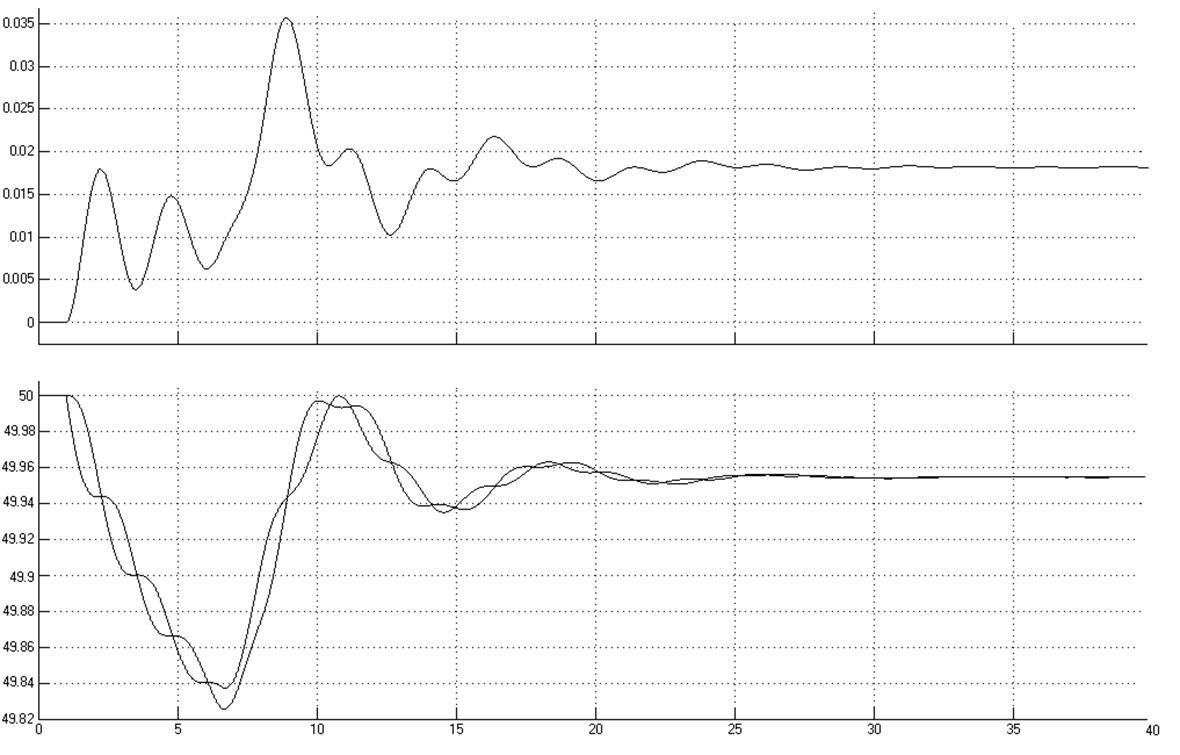
Рисунок 3.9 - Осцилограми як, що АРЧО мають різну крутість характеристик регуляторів швидкості
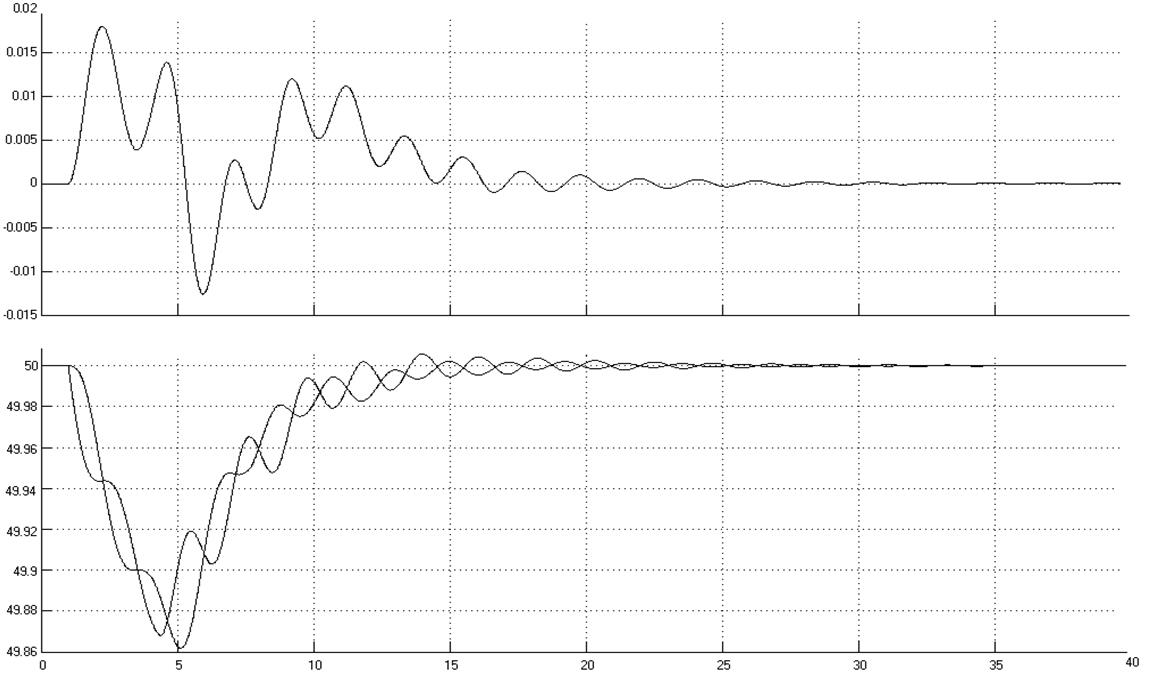
Рисунок 3.10 - Осцилограми включення регуляторів частоти й перетока потужності другої станції.
3.5 Моделювання зміни частоти в трьох машинній системі
Як видно зі структурної схеми системи автоматичного регулювання частоти по миттєвому відхиленню стосовно до двох машинної системи рисунок 2.5 її комп'ютерну модель можна поширити на трьох машинну систему.
Розглянемо енергосистему, що складається із трьох енергорайонов рисунок 3.11.
 |
Рисунок 3.11 - Трьох машинна система.
Особливістю такої енергосистеми є те, що кожен енергорайон характеризується не тільки своєї генерируемой РГ і споживаної РН потужностями, але й обмінними рівчаками потужності із суміжними районами Рij. Поскольку переток потужності зв'язаний обов'язково із двома енергорайонами, те в моделі необхідно враховувати перетоки потужності між кожними районами.
Віртуальна модель автоматичного регулювання частоти й потужності по миттєвому відхиленню рисунок для трьох машинної системи наведена на рисунку 3.12.
Субсистемы 1, 2 й 3 моделюють системи регулювання швидкості обертання турбін й автоматичного регулятора частоти й перетока потужності. У якості на рисунку 3.13 наведена розгорнута субсистема 1.
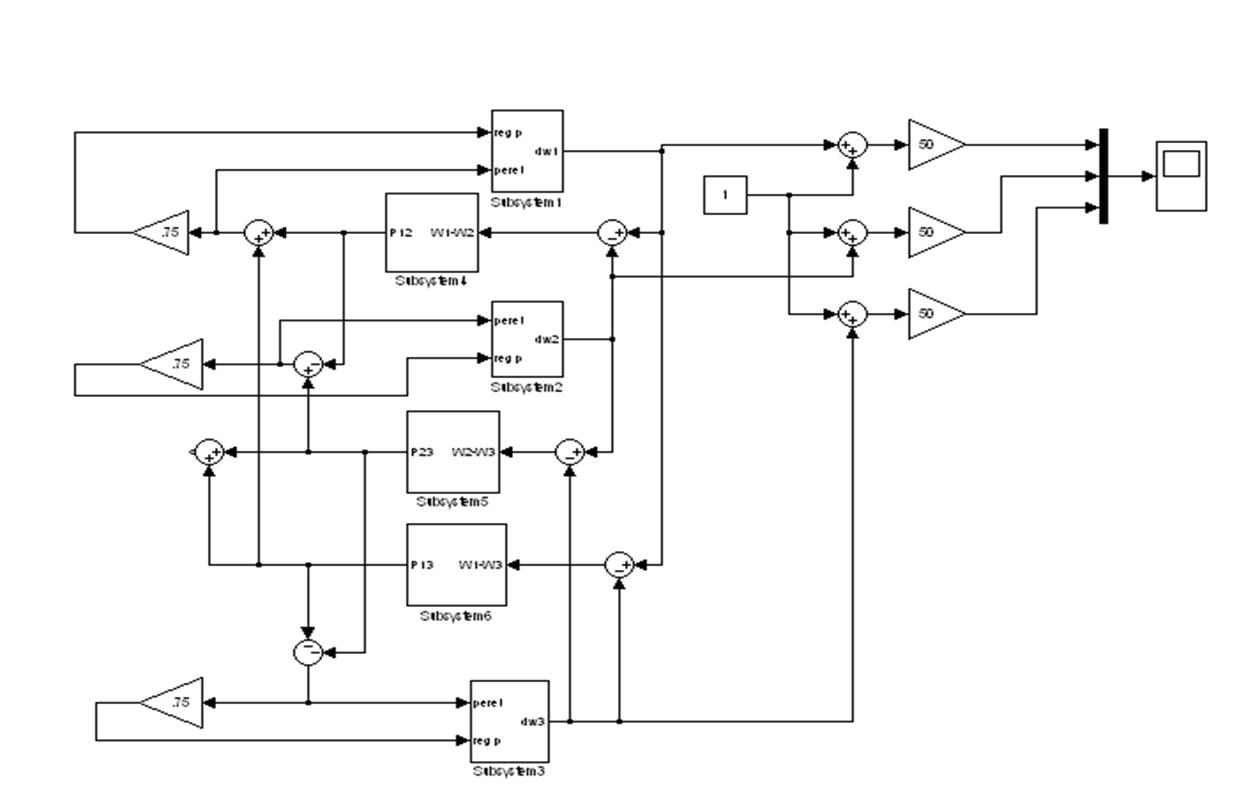
Рисунок 3.12 - Модель автоматичного регулювання частоти й потужності по миттєвому відхиленню для трьох машинної системи
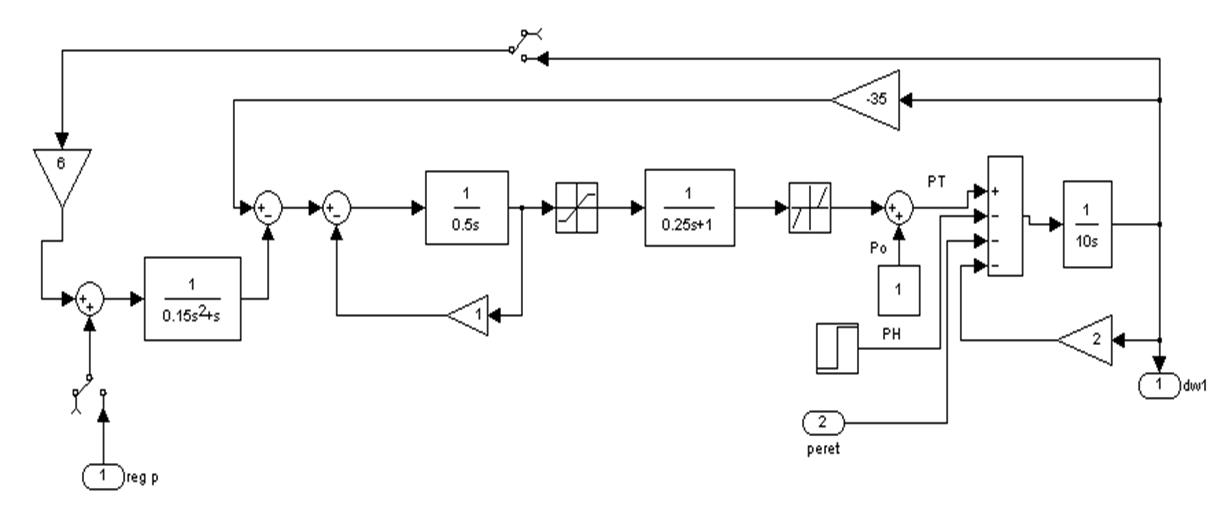
Рисунок 3.13 - Модель системи регулювання швидкості обертання турбін й автоматичного регулятора частоти й перетока потужності
Субсистемы 4,5 й 6 моделюють переструми потужності в енергосистемі В якості на рисунок 3.14 наведена розгорнута субсистема 4.

Рисунок 3.14 - Субсистема розрахунку перетоку потужності в трьох машинной системі.
3.6 Результати моделювання зміни частоти в трьох машинній системі
На рисунках 3.15 - 3.17 приведені осцилограми зміни частоти й перетока потужності в трьох машиній системі при миттєвому потужності навантаження на 2% у двох енергосистемах з урахуванням різних факторів.
На рисунку 3.15 наведені осцилограми зміни частоти, а на рисунку 3.16 перетока потужності, коли працюють регулятори частоти тільки в першій енергосистемі. Як видно з рисунку 3.15, резервної потужності першої енергосистеми недостатньо для компенсації додаткової потужності й частота в мережі зменшується на 0.145 Гц. Між частинами енергосистеми виникають перетоки потужності , що видно з рисунка 3.16.
На рисунку 3.17 наведені осцилограми зміни частоти й перетока потужності, коли працюють регулятори частоти в першій і другій енергосистемах. У ціому випадку резервної потужності кожної енергосистеми достатньо для компенсації додаткової потужності й у мережах встановлюється номінальна частота й перетоки потужності відсутні.

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.