























































Конспект лекций по курсу «Радионавигационные системы».
Перечень сокращений.
РНЦ – радиотехническое навигационное устройство
РНС – радионавигационная система
ТРНП – текущие радионавигационные параметры
РТСН – радиотехническое средство навигации
РНП – радионавигационный параметр
ДНА – диаграмма направленности антенны
РМ – радиомаяк
РП – радиопеленгатор
ИП – истинный пеленг
ПИ – приемоиндикатор
ПС – принятый сигнал
ЗС – запросный сигнал
ПВ – плотность вероятности
ФП – функция (функционал) правдоподобия
МП – максимум правдоподобия
ОП – отношение правдоподобия
МАВ – максимум апостериорной вероятности
СФ – согласованный фильтр
ЧХ – частотная характеристика
ЛД – линейный детектор
ИСЗ – искусственный спутник Земли
СРНС – спутниковая радионавигационная система
1. ОБЩИЕ СВЕДЕНИЯ О НАВИГАЦИОННЫХ ИЗМЕРЕНИЯХ.
1.1. Основные понятия и определения.
Радионавигация – область науки и техники, охватывающая радиотехнические методы и средства вождения движущихся объектов (кораблей, самолетов, космических аппаратов и т.д.). Основной задачей, решаемой при радионавигации, является определение координат объекта.
Навигационные измерения – составная часть навигации подвижных объектов. Сущность навигационных измерений заключается в определении текущих навигационных параметров, характеризующих положение и движение объекта.
Навигационные параметры (элементы) можно разделить на четыре группы:
1) навигационные элементы, характеризующие положение и перемещение центра масс объекта в пространстве в различных системах координат, которые принято называть вектором состояния объекта (это координаты, составляющие вектора скорости, ускорений и т.п.);
2) навигационные элементы, определяющие перемещение объекта относительно его центра масс (крен, тангаж, курс и их производные);
3) навигационные элементы, характеризующие состояние окружающей среды (скорость ветра, температуру, давление и т.п.);
4) навигационные элементы, характеризующие положение и относительное перемещение навигационных объектов (радиомаяков, ориентиров и т.п.).
Радиотехническое навигационное устройство (РНУ) – радиотехническое средство, предназначенное для измерения текущих навигационных параметров (ТРНП). К РНУ относятся радиовысотомеры, допплеровские измерители путевой скорости, радиолокационные координаторы и т.п.
Радионавигационная система (РНС) – совокупность взаимосвязанных единым алгоритмом РНУ и предназначенных для самостоятельного измерения ТРНП при их совместной работе.
1.2. Классификация радиотехнических средств навигации.
Несмотря на большое разнообразие типов РНУ и РНС, можно выделить целые группы радиотехнических средств навигации (РТСН), обладающих некоторыми общими признаками, и на этой основе произвести их классификацию. Признаками классификации могут быть место установки РТСН (наземные, бортовые-корабельные, самолетные, космические и т.д.); мобильность (стационарные, подвижные); размещение аппаратуры в пространстве (однопунктные, многопунктные, с совмещенными и разнесенными пунктами приема и передачи); вид измеряемого ТРНП (дальность, сумма или разность дальностей, направление, радиальная скорость и др.). Однако наиболее важным признаком классификации, определяющим структуру РТСН являются наличие источников излучения радионавигационного сигнала и вид измеряемых параметров.
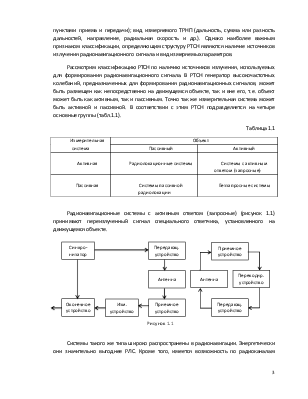
Рассмотрим классификацию РТСН по наличию источников излучения, используемых для формирования радионавигационного сигнала. В РТСН генератор высокочастотных колебаний, предназначенных для формирования радионавигационных сигналов, может быть размещен как непосредственно на движущемся объекте, так и вне его, т.е. объект может быть как активным, так и пассивным. Точно так же измерительная система может быть активной и пассивной. В соответствии с этим РТСН подразделяется на четыре основные группы (табл.1.1).
Таблица 1.1
|
Измерительная система |
Объект |
|
|
Пассивный |
Активный |
|
|
Активная |
Радиолокационные системы |
Системы с активным ответом (запросные) |
|
Пассивная |
Системы пассивной радиолокации |
Беззапросные системы |
Радионавигационные системы с активным ответом (запросные) (рисунок 1.1) принимают переизлученный сигнал специального ответчика, установленного на движущемся объекте.
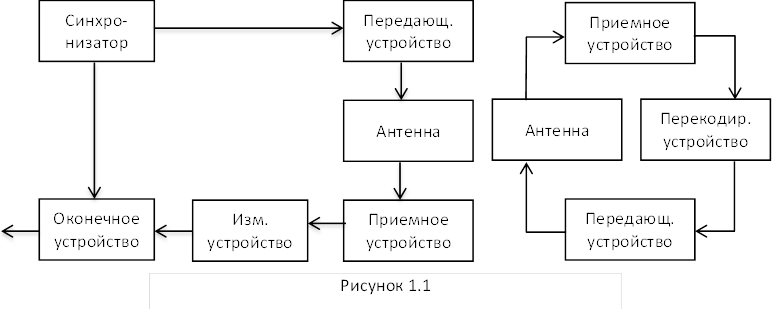
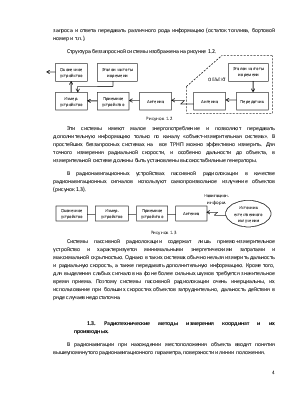
Системы такого же типа широко распространены в радионавигации. Энергетически они значительно выгоднее РЛС. Кроме того, имеется возможность по радиоканалам запроса и ответа передавать различного рода информацию (остаток топлива, бортовой номер и т.п.).
Структура беззапросной системы изображена на рисунке 1.2.
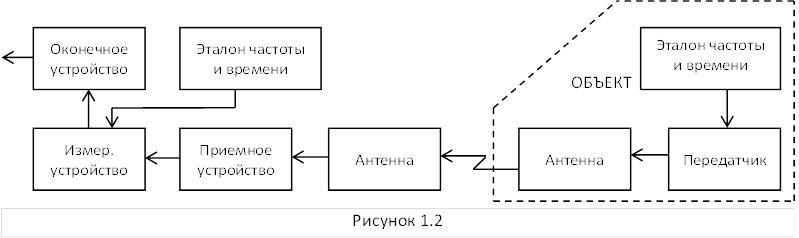
Эти системы имеют малое энергопотребление и позволяют передавать дополнительную информацию только по каналу «объект-измерительная система». В простейших беззапросных системах на все ТРНП можно эффективно измерить. Для точного измерения радиальной скорости, и особенно дальности до объекта, в измерительной системе должны быть установлены высокостабильные генераторы.
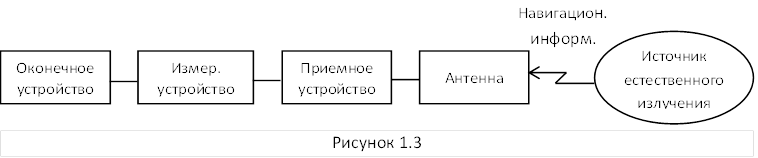 В радионавигационных устройствах пассивной радиолокации в качестве
радионавигационных сигналов используют самопроизвольное излучение объектов
(рисунок 1.3).
В радионавигационных устройствах пассивной радиолокации в качестве
радионавигационных сигналов используют самопроизвольное излучение объектов
(рисунок 1.3).
Системы пассивной радиолокации содержат лишь приемо-измерительное устройство и характеризуется минимальными энергетическими затратами и максимальной скрытностью. Однако в таких системах обычно нельзя измерить дальность и радиальную скорость, а также передавать дополнительную информацию. Кроме того, для выделения слабых сигналов на фоне более сильных шумов требуется значительное время приема. Поэтому системы пассивной радиолокации очень инерциальны
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.