модифицированную систему модального управления с полными измерениями (по управляющему и возмущающему воздействиям);
з) модифицированную систему модального управления, замкнутую через наблюдатели полного и пониженного порядка (по управляющему воздействию с отклонением по НУ).
Исходные данные:
Вариант 36:
Структурная схема: № 12
Вариант параметров: № 1
Структурная схема САУ:
 |
Параметры элементов:
K1 = 2.2
K2 = 1.5
K3 = 2
T1 = 1
T2 = 3
T3 = 5
1. Представим математическое описание объекта управления , заданного структурной схемой, в виде дифференциальных уравнений в нормальной форме Коши.
Запишем
уравнения для координат состояния ![]() и
и ![]() .
.
Уравнения
в операторной форме:
 или
или

Переходя во временную область, получим математическую модель объекта управления в виде дифференциальных уравнений в нормальной форме Коши:
Векторно-матричную модель заданного объекта представим в форме:
![]()
где x = [x1, x2]T – двумерный вектор координат состояния, u, f – скалярные управляющее и возмущающее воздействия соответственно;
A – собственная матрица объекта управления
B – матрица управлений
M – матрица возмущений
Составим матрицу объекта управления. Её строки соответствуют правым частям уравнений координат состояния, а столбцы – коэффициентам перед каждой координатой.
Матрица управлений представляет собой вектор-столбец, состоящий из коэффициентов перед управляющим воздействием. Если в каком-либо из уравнений нет, то коэффициент равен нулю.

Аналогично составляется матрица возмущений:
Подвергнем матричное уравнение (1) преобразованию Лапласа и выразим x:
![]()
![]()
![]()
где E - единичная матрица, по главной диагонали которой располагаются единицы, а все остальные элементы – нули. Разделив правую и левую части последнего выражения на u при f = 0, получим матричную передаточную функцию ОУ по управлению:
![]()
Аналогично при u = 0 получаем матричную передаточную функцию объекта управления по возмущающему воздействию:
![]()
Установившиеся значения координат состояния объекта при подаче единичного управляющего воздействия:
Установившееся значение при подаче единичного возмущающего воздействия:
Здесь
![]() – обратная матрица, определяемая выражением
– обратная матрица, определяемая выражением

Характеристический полином ОУ зависит от собственной матрицы А и равен определителю
Получим присоединенную матрицу:
тогда


Установившиеся значения координат состояния при подаче единичного управления
Установившиеся значения координат состояния при подаче единичного возмущения

Произведём моделирование в системе Matlab Simulink и проверим расчёты.
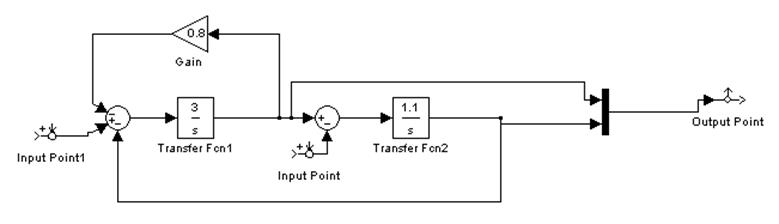
Рисунок 1. Моделирование единичного управляющего и возмущающего воздействия
|
||
|
Рисунок 2. Моделирование установившихся значений координат состояния при подаче единичного управления
|
|
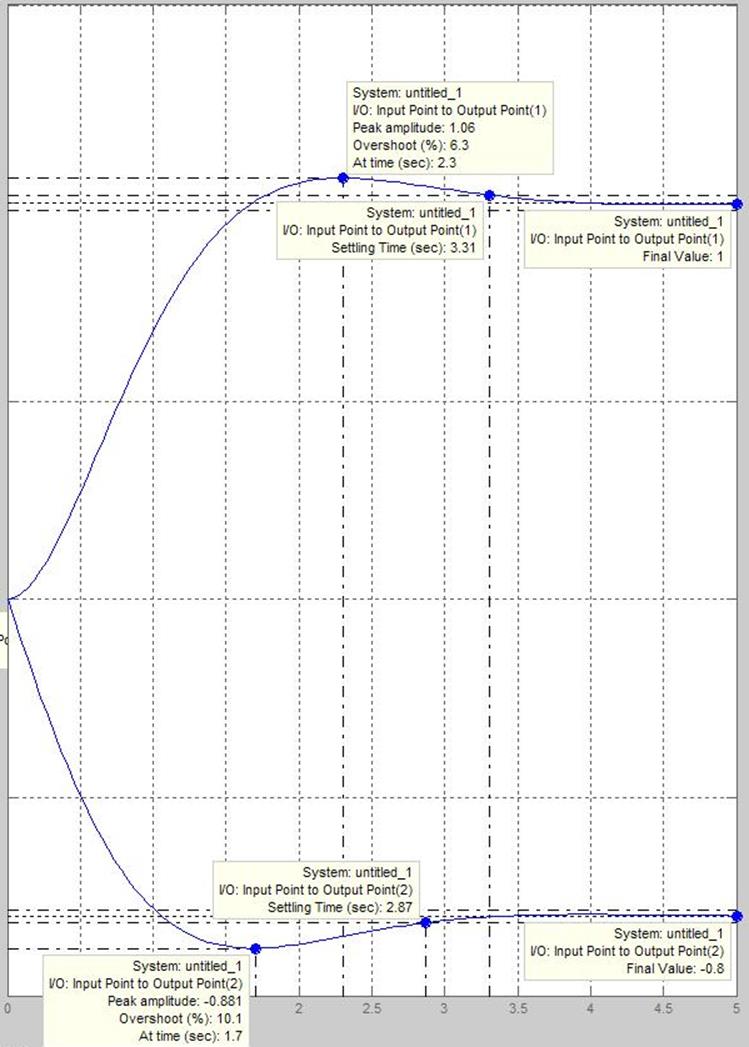
Переходные процессы в ОУ по управляющему воздействию изображены на рис.2.
Определим показатели качества по координате ![]() :
:
- установившееся значение:
![]()
- максимальное перерегулирование:
![]()
- время регулирования
![]()
- количество колебаний:
![]()
Определим показатели качества по координате ![]() :
:
- установившееся значение:
![]()
- максимальное перерегулирование:
![]()
- время регулирования
![]()
- количество колебаний:
![]()
Переходные процессы в ОУ при возмущающем воздействии изображены на рис.3.
Определим
показатели качества по координате ![]() :
:
- установившееся значение:
![]()
- максимальное перерегулирование:
![]()
- время регулирования
![]()
- количество колебаний:
![]()
Определим
показатели качества по координате ![]() :
:
- установившееся значение:
![]()
- максимальное перерегулирование:
![]()
- время регулирования
![]()
- количество колебаний:
![]()
Вывод: Моделирование подтверждает теоретические расчёты. Сходимость результатов высокая.
2. Перед началом синтеза модального регулятора необходимо произвести проверку условия управляемости.
Для
полной управляемости объекта необходимо и достаточно, чтобы матрица управляемости
имела вид: ![]() , имела
бы полный ранг (ранг матрицы управляемости равен порядку объекта) [1.7, с.8]:
, имела
бы полный ранг (ранг матрицы управляемости равен порядку объекта) [1.7, с.8]:
rang(Y)=n.
Для заданного объекта матрица управляемости Y имеет вид
![]() .
.
Найдем ранг матрицы Y:
ее
диагональный минор второго порядка равен ![]()
Из последнего неравенства следует, что рангY равен порядку объекта
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




