Мощность и момент, подводимые к ведущим колесам
При всех режимах движения, кроме наката и торможения с объединенным двигателем
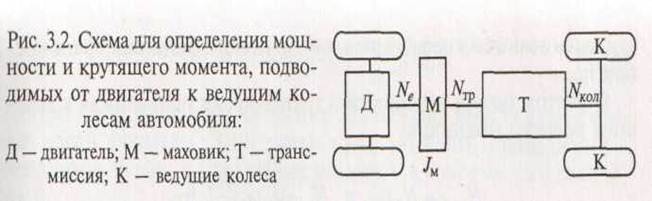
где – Nе – эффективная мощность двигателя;
Nтр – мощность, подводимая к трансмиссии;
Nт = Nкол. – мощность, подводимая к ведущим колесам;
jм = момент инерции маховика (всех вращающихся
частей двигателя и трансмиссии)
Затраты на
раскручивание![]() , где : А –
кинетическая энергия вращающихся частей
, где : А –
кинетическая энергия вращающихся частей
![]()
![]() или
Nтр = Nе
– jм *
или
Nтр = Nе
– jм * ![]()
и с учетом потерь в трансмиссии подводимая к ведущим колесам мощность Nкол = Nтр * ηтр ,
в свою очередь ![]() , где:
, где:
![]() - угловая частота
(скорость) ведущего колеса
- угловая частота
(скорость) ведущего колеса
![]() - передаточное число
трансмиссии
- передаточное число
трансмиссии
![]() - КПД трансмиссии
- КПД трансмиссии
итр
= икп * ид* иглв
результате: Nт = Nкол
= Ne *![]()
![]() где
при
где
при ![]()
2
–ой член уравнения = 0 и тогда Nт
= Nе *![]() - тяговая
мощность
- тяговая
мощность
Мт = Ме * итр
*![]() - тяговый
момент
- тяговый
момент
Потери мощности в
трансмиссии Nтр
= Nе – Nт
КПД трансмиссии - ![]() =
=![]() =
=  =
= 
или ![]() для
ГМП:
для
ГМП: ![]()
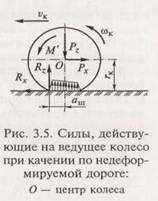
Ведущее колесо и силы, действующие на него
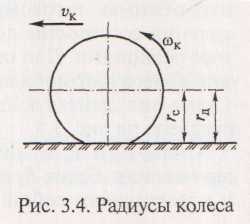 |
rс - статистический радиус
rд - динамический
радиус rкач
=
![]()
rкач - радиус качения
для расчетов: (1 дюйм = 25,4 мм)
rк = 0,0127 * d + 0,00085 * B
d - посадочный диаметр колеса (в дюймах)
B - ширина профиля шины (в мм)
rк - в метрах
![]() , [
, [ ![]()
При
прямолинейном движении ![]()
![]() , т.е. скорость а/м =
скорости качения колеса
, т.е. скорость а/м =
скорости качения колеса
![]()
![]() , где 3,6 -
переводной коэффициент (из
, где 3,6 -
переводной коэффициент (из ![]() в
в ![]() )
)![]()
![]()
![]()

![]() - передаточное
число трансмиссии
- передаточное
число трансмиссии
Pк * ![]() =
Rz
* aш и
Pк =
Rz
*
=
Rz
* aш и
Pк =
Rz
* ![]() = Gа
* f *
= Gа
* f * ![]() , где
Gа
*
, где
Gа
* ![]() - вертикальная
составляющая сила тяжести а/м (на подъеме)
- вертикальная
составляющая сила тяжести а/м (на подъеме)
![]() = f
- коэффициент
сопротивления качению,т.о. Pк
=f * Rz -
сила сопротивления качению, если нет динамических нагрузок, то
= f
- коэффициент
сопротивления качению,т.о. Pк
=f * Rz -
сила сопротивления качению, если нет динамических нагрузок, то
![]() Rz
=
Gк (вес
а/м на колесо) , тогда Pк
=f * Gк и
для всего а/м - Pк
=f * Gа
Rz
=
Gк (вес
а/м на колесо) , тогда Pк
=f * Gк и
для всего а/м - Pк
=f * Gа
Мощность, необходимая для преодоления «f»:
Nк
=  =
=  ,
[квт]
,
[квт]
Mк
= Pк
* ![]() =
f * Rz *
=
f * Rz *
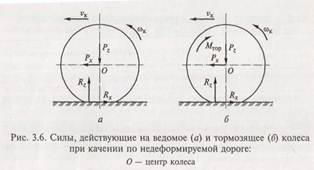
![]() У
ведомого и тормозного колес Rx
– касательная реакция
У
ведомого и тормозного колес Rx
– касательная реакция
направлена против движения и имеет знак минус.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.